How ScanFish Equinox was used to image the M/S Estonia’s sinking path finding objects smaller than 10 cm
‘We imaged small objects, which we would never have been able to detect with a conventional sidescan sonar, thanks to Equinox’s high-resolution Solstice multi-aperture sonar. We were able to save a lot of time and deliver higher quality data with the stable 3D control of the ScanFish ROTV platform and the positioning accuracy provided by the combination of USBL and INS.’
Thorbjørn Ekfeldt
Reach Subsea Project Manager
According to the official investigation, the passenger ferry M/S Estonia sank in 1994 due to the collapse of the bow structure in heavy weather – systemic failures in design, construction and certification processes contributing to the technical failure. In 2020, a private ROV wreck investigation found unknown holes in the wreck, generating renewed public interest in its story. Many speculated about the reason for the accident, so the preliminary assessment of the new information was initiated by the Estonian Safety Investigation Bureau together with Swedish and Finnish Safety Investigation Authorities to identify the cause of penetrating deformations, to assess the validity of the conclusions presented in the final report of the investigation commission (JAIC) and to assess whether the safety investigation of the accident should be re-opened.
To check whether the vessel could theoretically sink due to the newfound holes in the starboard hull, Estonian Safety Investigation Bureau decided to conduct numerical simulations of different sinking scenarios. To assess the probability and possibility of these scenarios, several aspects and evidence could be considered, for example the actual timeframe, geographical space, list development and witness statements etc of the accident. Possible sinking scenarios should comply with the actual sinking track in known timeframe. For that reason, a better and detailed understanding of the vessel’s sinking track was needed. It was expected that numerous manmade objects entered the water column from the time the accident started, and these objects should provide the basis for a better reconstruction of the ship’s track.
Note that at the time of writing, the data analysis is ongoing, and this case will be updated when the results are released to the public.
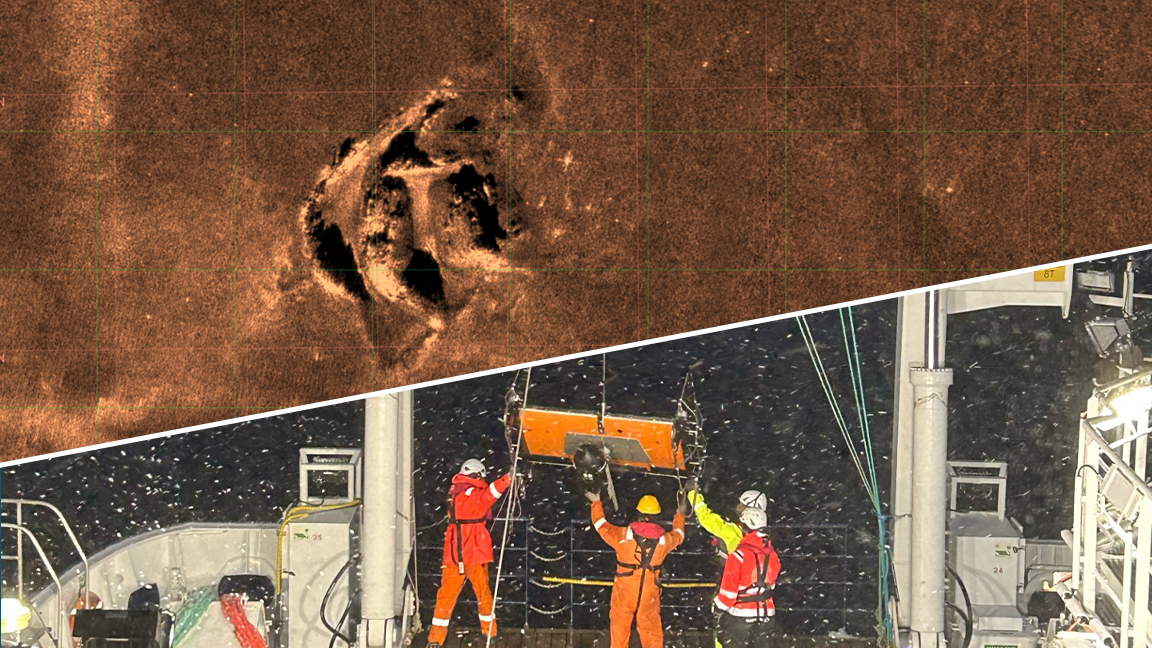
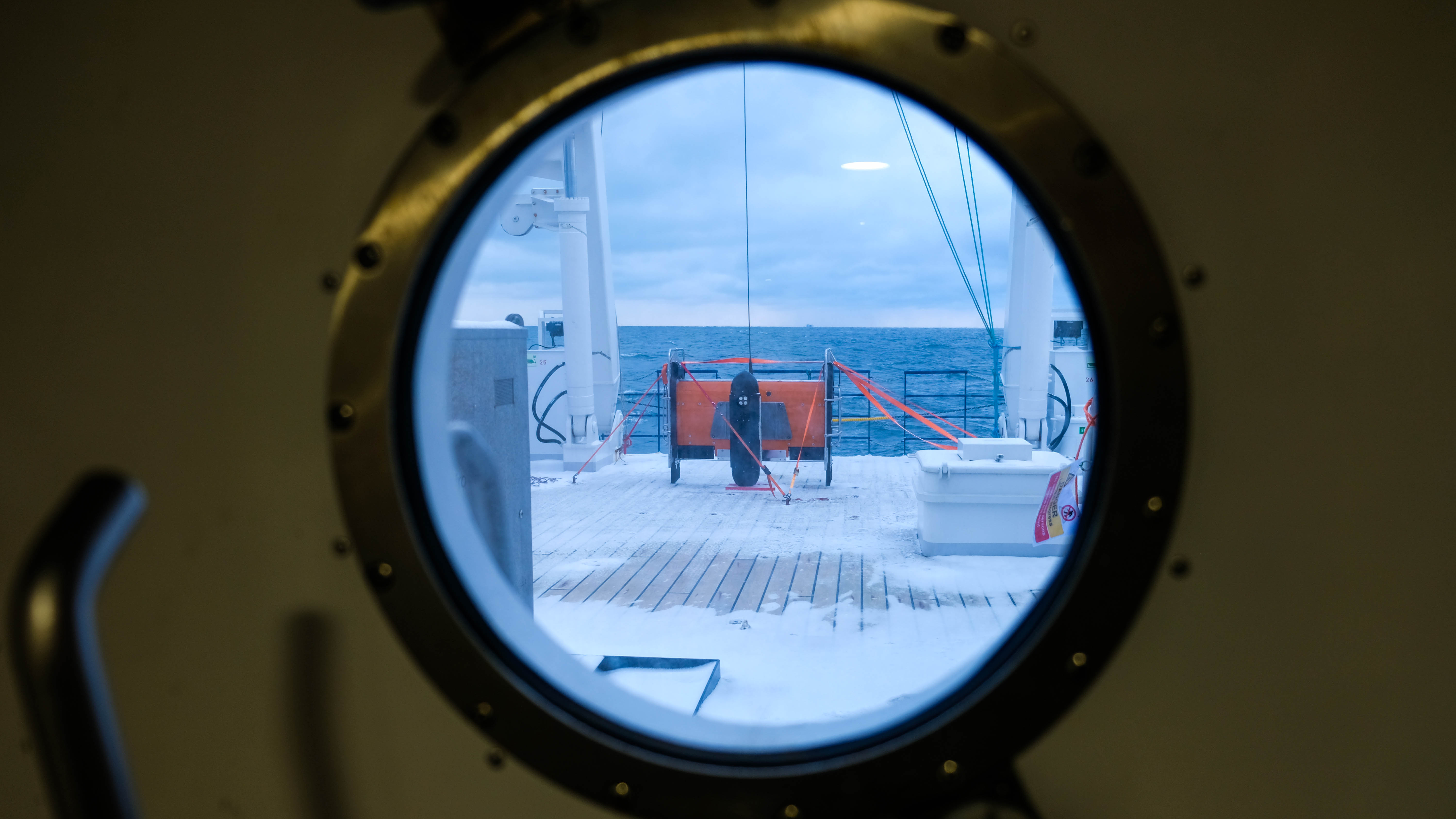
Collected MAS data (top) and a photo of deploying Equinox one snowy evening (bottom) - Photos courtesy of Reach Subsea (top) and Tauri Roosipuu / ESIB (bottom)
The challenges of a detailed subsea site survey
To identify the small objects that had fallen from the wreck as it sank, the bureaus needed a high-resolution survey of the seabed in the area around the wreck. For this, they hired Reach Subsea. The bureaus required data to be collected at a high enough resolution to image and identify objects on the seafloor <10 cm in size. The resolution ended up being 30 mm x 30 mm.
To achieve this high-resolution imaging in the short time frame they were given, Reach Subsea needed a survey setup that could…
- Safely survey close to the seabed and wreck
- Avoid holes in data when surveying with tight runlines
- Collect high-resolution imaging data
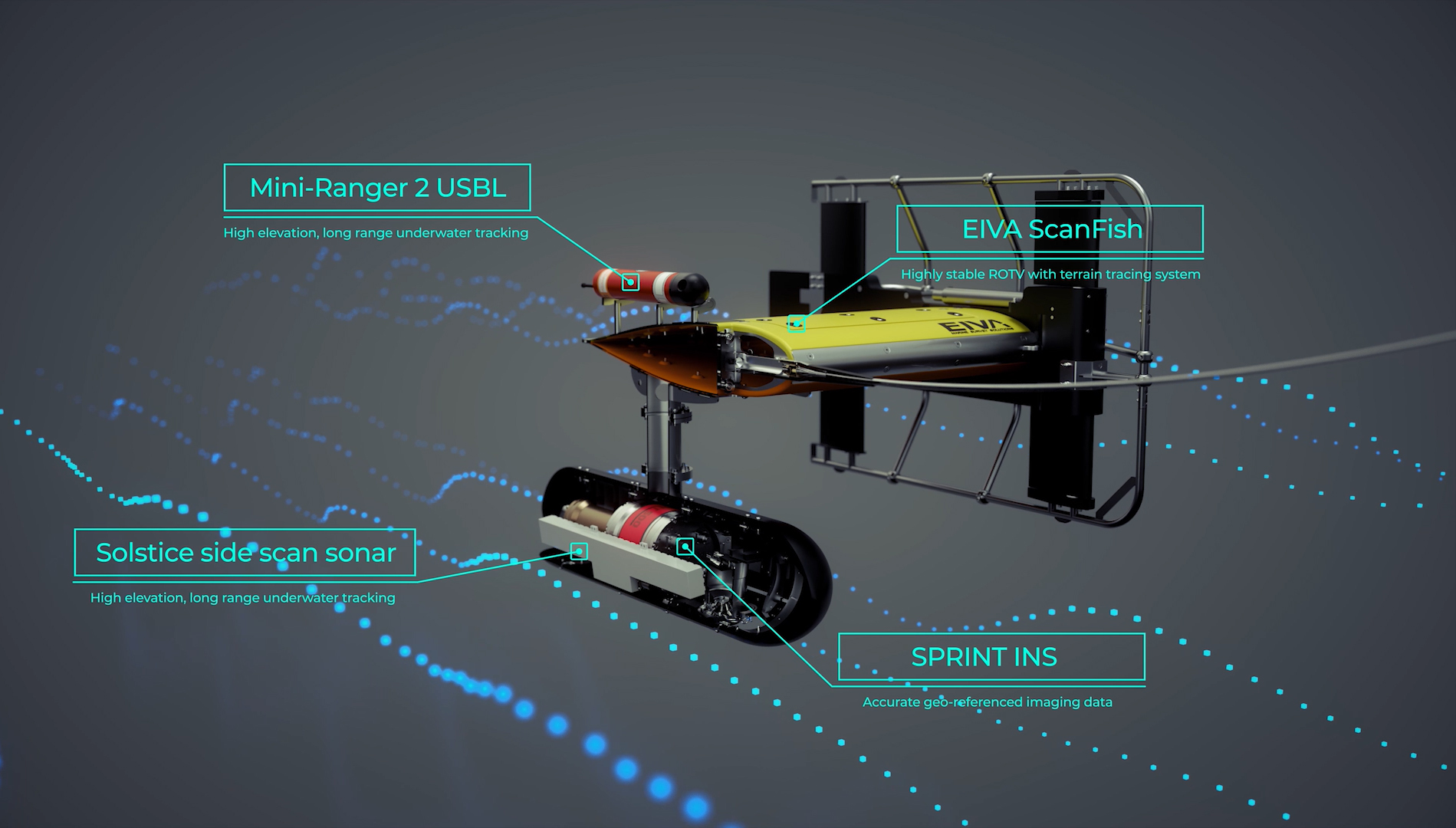
For this, they chose to rent ScanFish Equinox, a total sensor platform solution combining EIVA’s ScanFish 3D remotely operated towed vehicle (ROTV) and NaviSuite Kuda survey software with Sonardyne’s SPRINT INS and Wavefront’s Solstice multi-aperture sonar (MAS). This was combined with the vessel’s own positioning system, a Kongsberg HiPAP 501 SSBL.
Learn more about the Equinox remotely operated towed vehicle
How the Equinox solution provides the 3D control and sensor quality needed
Subsea sensors, such as sidescan sonars, work best at a sweet spot distance from the object they are scanning.
‘We chose Equinox because we knew that in order to achieve the resolution needed to identify small objects in the sinking path, the sensor would have to be kept close to the wreck and seabed around it. We therefore needed a highly controlled, high-resolution sensor solution to reduce the risk of a crash. A big benefit to our survey was that the stability of the Equinox platform was really good.’ – Thorbjørn Ekfeldt
EIVA’s ROTVs are designed to keep payload sensors at a fixed height close to the seabed – through precise control both vertically and horizontally.
Firstly, the vertical control is achieved through the ScanFish Flight software which uses a built-in altimeter on the ROTV to measure the height above the seabed and maintain a fixed distance. ScanFish Equinox can keep a distance-to-terrain at 7.5 m for optimal MAS data collection and safe operation.
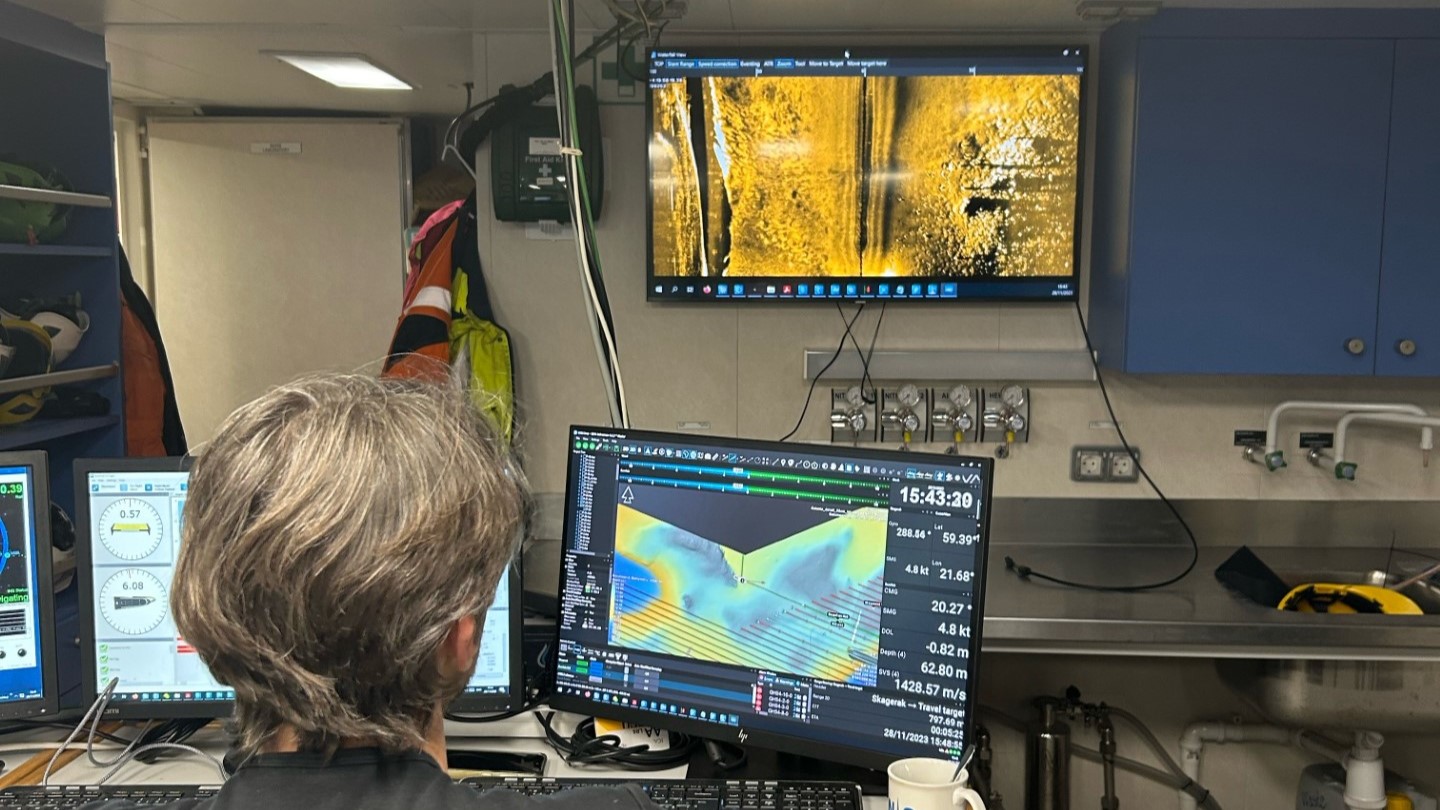
Screens displaying EIVA’s ScanFish Flight software, NaviSuite Kuda optimal runline planning and real-time data displays onboard R/V Skagerak – Photo courtesy of Therese Sundberg
Avoiding gaps – Optimising horizontal runlines
‘When acquiring data with sensors so close to the seabed, the survey lines become really tight. To avoid holes in-between survey lines, the runline planning software and precise horizontal control capability of Equinox was very useful.’ – Thorbjørn Ekfeldt
Delivered together with Equinox is the survey software bundle NaviSuite Kuda Pro + Processing for navigation, acquisition and display of data. This features automatic optimal runline planning tools.
‘I made a rough mission plan to give the survey team, and they then used NaviSuite Kuda to do the optimised runline planning onboard the vessel.’ – Thorbjørn Ekfeldt
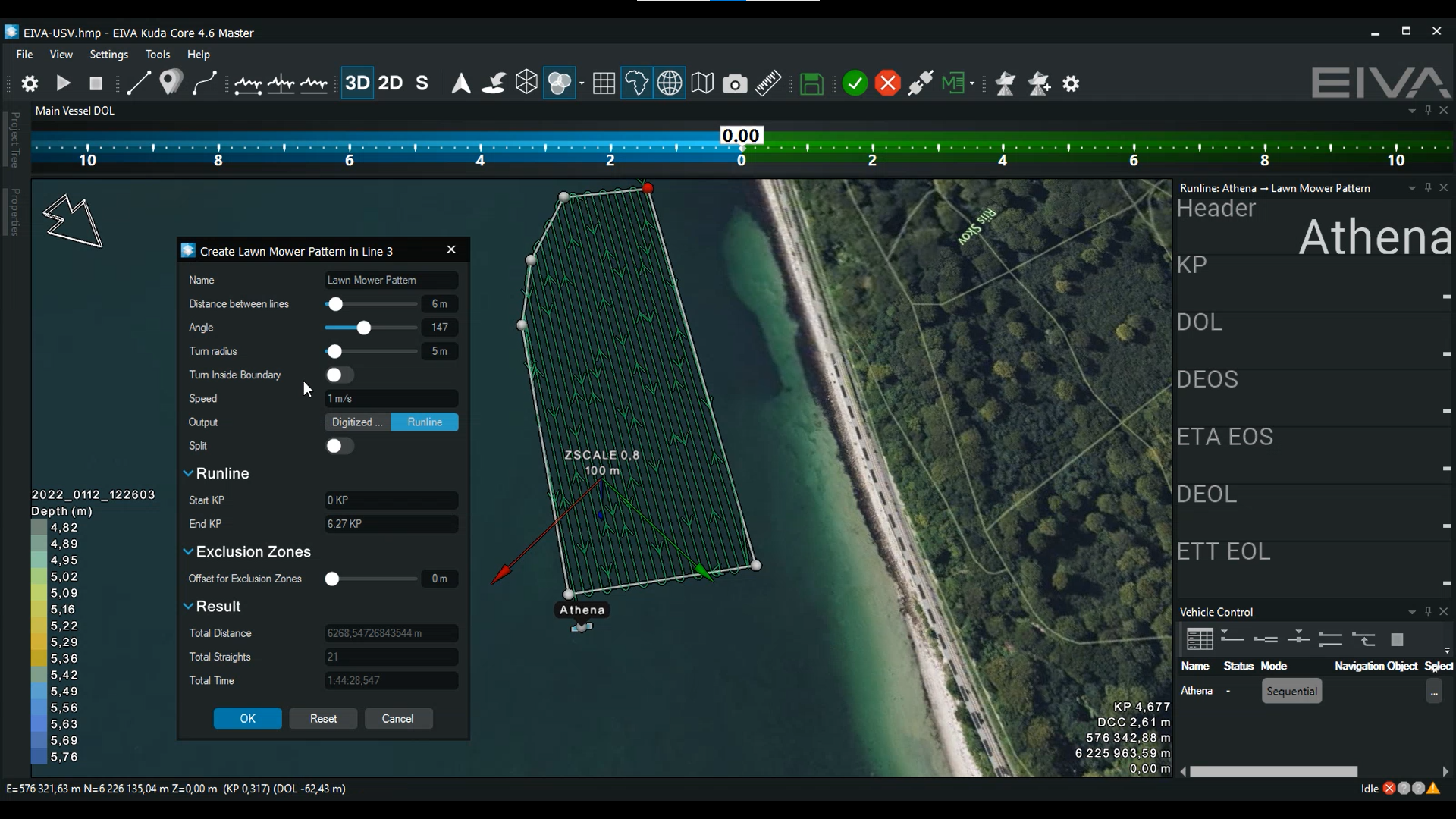
Check out one of EIVA NaviSuite’s automated runline planning tools, Lawn Mower Pattern, in action
High-resolution data thanks to MAS sensor – upgrade for future survey setups
‘An added benefit of using Equinox is that, at the moment, we are interested in upgrading the sidescan sonar on our ROV systems, and from R&D perspective, it was good to test out the Solstice. We were very happy with this sensor – as there are some objects we can see in the collected data, which we would never have been able to detect with other sonars. Therese Sundberg, our senior geologist, has been target picking in the data and said that in her 20 years of experience, she has never seen such high-resolution sonar imaging data before.’ – Thorbjørn Ekfeldt
The results saved time during data processing
By using a solution that ensures positioning accuracy during data collection, Reach Subsea was able to reap the benefits during data processing…
‘With Equinox, we saved a lot of time, for example by avoiding spending time on line infill, sonar mosaics and reruns. The high quality of the sensors meant that we spent less time processing data because we could rely on the positioning achieved by the combination of Mini-Ranger 2 USBL and SPRINT INS. It provided a level of quality far beyond using a conventional sidescan sonar with just USBL. Both we and our client are very happy with the data quality we delivered and the efficiency of the operation.’ – Thorbjørn Ekfeldt
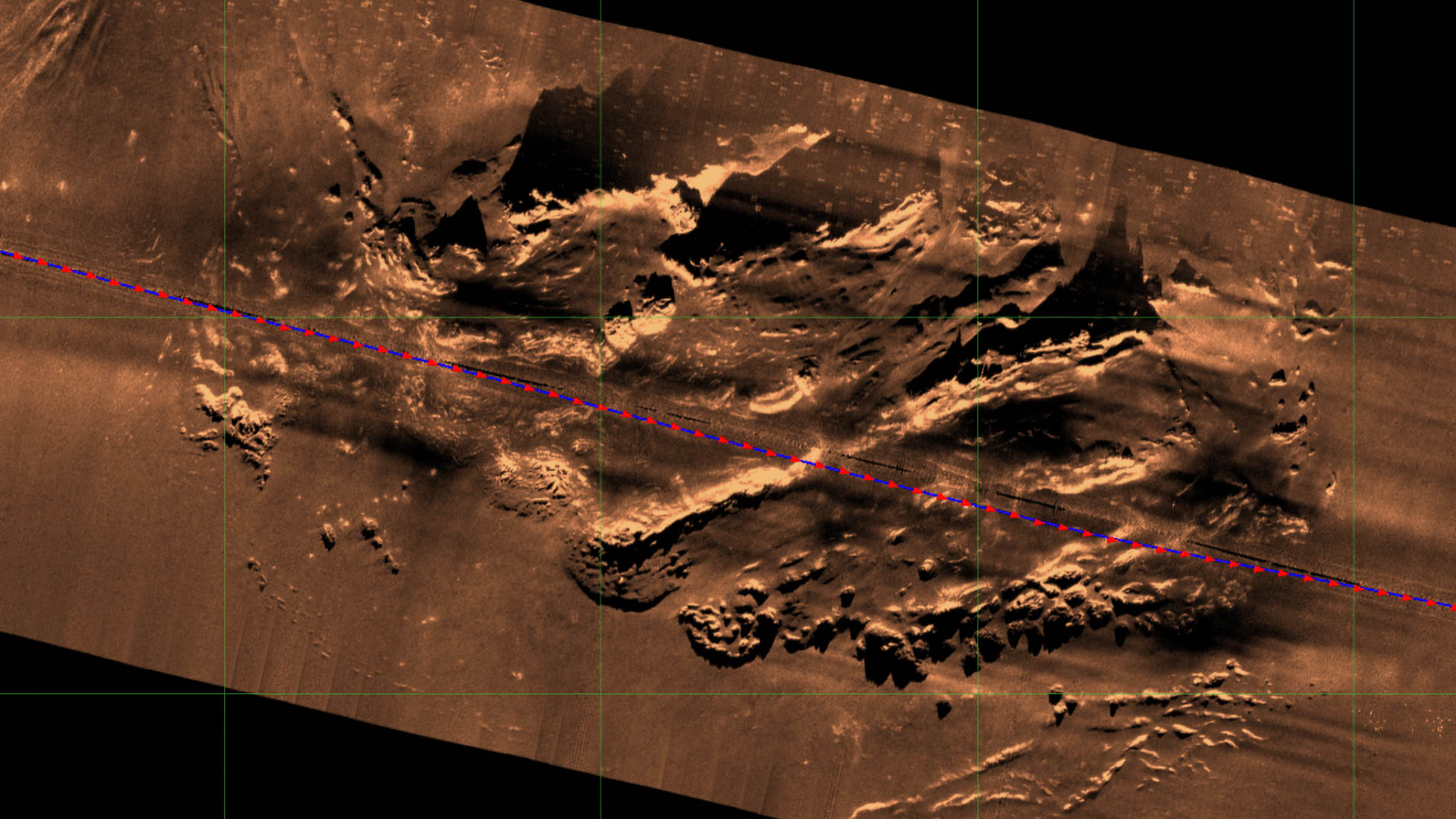
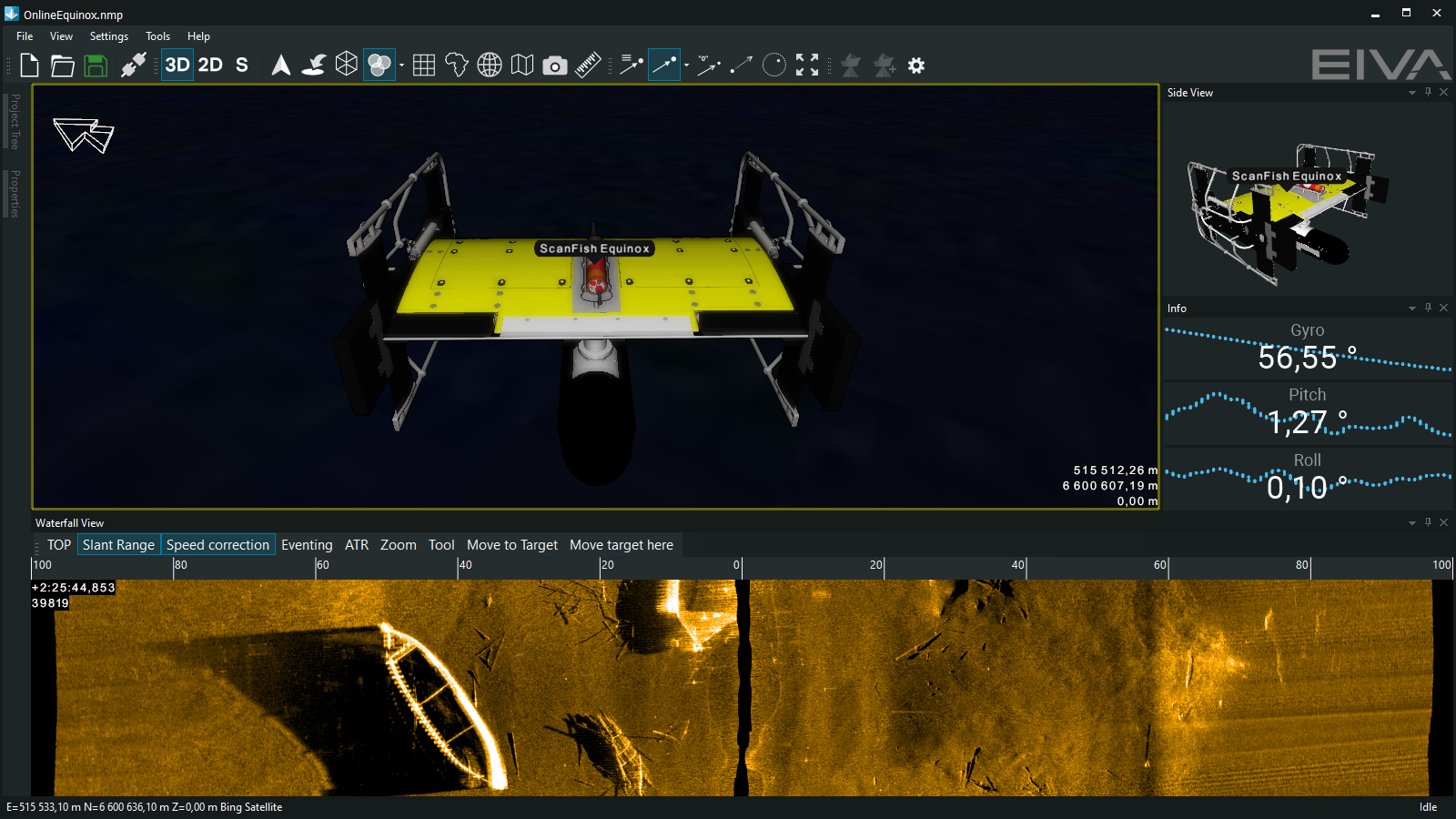
Screenshot of the MAS data collected with Equinox – Photo courtesy of Reach Subsea
Facts and figures
- 4 km2 area was surveyed
- ~230 km runline sailed in total
- Equinox provides real-time motion compensation and target position accuracies better than 1 m DRMS
- Image pixel resolution 30 mm x 30 mm
Products in play
Equinox is an integrated, towed multi-aperture sidescan sonar solution offering high stability, position accuracy and high-resolution, real-time results. It consists of
- ScanFish 3D ROTV
- High-resolution payload featuring Wavefront’s Solstice multi-aperture sonar (MAS)
- NaviSuite Kuda survey software enabling smoother obstacle avoidance and advanced data processing and delivery
- Sonardyne’s SPRINT INS and Mini-Ranger 2 USBL
View of Equinox onboard R/V Skagerak – Photo courtesy of Tauri Roosipuu / ESIB