To use this site, please enable javascript
To use this site, please enable javascript
The oil and gas industry is constantly improving the operation workflow – with focus on cost and quality optimisation. The developments in sensor technologies mean a shift from profiling sonars, to multi-beam echo sounders to (now) subsea lasers, photogrammetry, photo and video mosaics etc. On the software processing side, the focus is on the automation of processing data, reducing man-hours through automating free span detection, boulder identification, advanced Kalman filtering to improve pipe tracker and other data to best position pipes, etc.
In the following piece, you can learn about the latest software available, including examples of how the latest 3D and 4D technologies have been used in a number of customer cases to assess the site development over time across many surveys.
Authors: EIVA CEO Jeppe Nielsen, EIVA Software Manager Ole Kristensen
(Based on technical paper published in connection with U.S. Hydro 2017)
Recent years’ development in graphics card price-performance has enabled the largest change in how inspection jobs are performed and documented. Even though 3D technologies have been around for many years, it is only recently that we are seeing a big adoption of 3D technology in pipeline inspection.
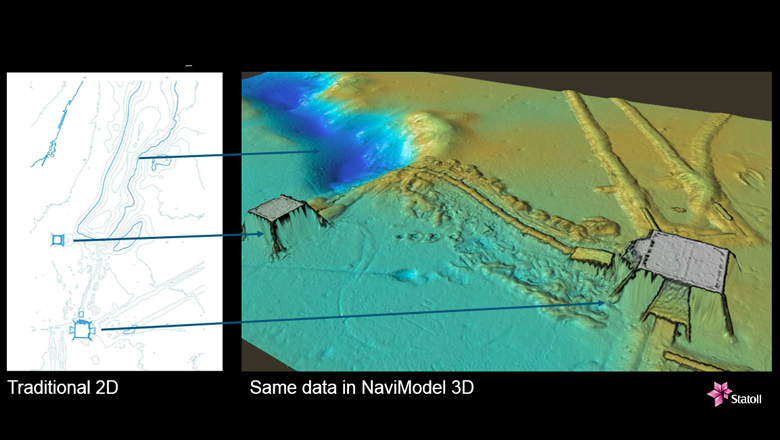
Comparison of 2D and 3D subsea data
There are huge benefits to using 3D over 2D. For example, while traditional profile views only show vertical bucklings, in the 3D view both sideways and vertical bucklings are easy to detect.

Difference between 2D and 3D views of bucklings
Many of the NaviSuite Nardoa (the NaviSuite software product dedicated to pipeline inspection) customers are extremely fond of the 3D capabilities for site visualisation that this software brings – including showing how the seabed and subsea installations look and how an inspection campaign is expected to be executed, as well as visualising analysis results after the survey.

Three surveys of the same pipe – notice the build-up of material and the scour generated (yellow is the newest survey)
NaviSuite Nardoa is a 3D system that handles many projects and introduces unique possibilities for analysing site development over time (4D). For example, changes in the installations, shifts in the seabed, event changes, etc, are all easily detected and visualised in NaviModel, the modelling and visualisation tool of NaviSuite Nardoa.
Traditionally, pipeline surveys have been made with some combination of camera, sonar and (sometimes) pipe tracker.

NaviModel can generate an interpolated seabed DTM from very sparse scanning sonar data
Some companies are still using scanning sonars, and many of the inspection techniques in use today in the industry look the way they do because of scanning sonars – profile-based eventing, side-flag setting, profile-based calculation of out-of-straightness etc.
A high-resolution multi-beam sonar has been the norm for many years, providing an extra data density that opens up a new way of working and a new set of information. In the past few years, the use of subsea lasers has exploded, and the laser is typically combined with a multi-beam echo sounder (MBE). The MBE is used for the wider swath and seabed, while the subsea laser allows for millimetre-level resolution of the pipe itself.

Typical DTM derived from ROV-based multi-beam echo sounder

High-resolution laser data is becoming the norm (data courtesy: DEEPOCEAN)
The acquisition of both subsea laser and multi-head multi-beam data is now the norm for the very high-end pipeline inspection companies – and NaviSuite Nardoa handles this acquisition nicely.
Both sonar and laser data come with some challenges in relation to noise, and so efficient, automated cleaning tools are needed in order to obtain an acceptable data-processing efficiency. The NaviSuite products contain a huge amount of different cleaning tools, including the S-CAN automated algorithm, which has been designed to automatically clean large amounts of data with repeatable, predictable results at high speed. As an added benefit: when working in NaviModel, removed soundings are not deleted, but are typically kept within the project – enabling later reprocessing and quality control by the end-client.
Pipeline inspection operations have traditionally depended on video cameras as the main source of information. This has changed radically these past few years.
Video technology is not new, but has developed from analogue cameras to higher-resolution digital cameras (Full HD, and now 4K). Video recording can be done on many DVR products, and NaviSuite Nardoa interfaces with many of the prominent ones, allowing users to leverage the investments they’ve already made in equipment.
However, video has a number of very big disadvantages:
The result is that the more advanced installations now tend to avoid video by, for example, recording high-resolution still pictures and then generating the video as a lower quality deliverable from those high-resolution images as part of the post-processing procedure.
In addition to much higher quality when compared to video, still images give a number of interesting possibilities:

Photomosaic made from (low-quality) video frames and draped on the pipeline object
Photo mosaics are easy to work with and give an immediate benefit on top of existing data sources. NaviSuite Nardoa has several ways of producing photo mosaics and several ways of viewing them.
One very powerful visualisation possibility is to drape the photo mosaics from the video onto the digitised representation of the pipeline so that the pipeline appears photorealistic.
Another possibility is to adopt photogrammetry techniques, which can produce a detailed point cloud by identifying common features in the individual pictures. The advantages of doing so are that there is no need for positioning or motion sensors and that the resolution of the resulting point cloud can be as high as the resolution of the original pictures. (Photogrammetry construction is still very processing-intensive and so most customers use dedicated third-party packages, and then use the results, combined with other data sources, within NaviModel.)

Coloured point cloud of the pipeline generated entirely from still images (data courtesy: MMT AB)
Each end-client (and sometimes, each inspection job) requires their own types of registrations (events). It is therefore essential to have an all-in-one eventing package such as the one in NaviSuite Nardoa, which:

NaviModel eventing tool combining terrain, events, video, event table, etc
Since a primary objective of pipeline surveys is to determine the location of the pipe, modern tools apply a variety of advanced techniques to identify and represent the pipe.
NaviSuite Nardoa uses a variety of different techniques, applicable in different scenarios, to identify the pipe:
It has been (and is) a challenge to find the location of a buried pipe. There are several different manufacturers on the market providing products that handle this, from established players (such as Teledyne TSS and Innovatum) to players bringing interesting new tracker technologies into play (such as PanGeo Subsea and Optimal Ranging).
The solutions on the market each have their own strengths, but sometimes also face challenges such as range to the target, calibration of the system and pipe crossings.
To overcome these challenges – or at least to help the data processors make the right decisions – we must ensure that all the data are brought through the system while still keeping the raw data, so decisions easily can be changed without having to perform a full reprocessing.
Status information for Teledyne TSS pipe tracker

Detected pipe location coloured by signal strength
We’ve found the optimal solution to be combining the pipe tracker data and using a Kalman filter where we combine pipe detection, pipe characteristics (bending regulations, stiffness etc) and potential known endpoints.
Track from pipe tracker (green) and Kalman-filtered track (blue)
Pipes on the seabed are a bit easier to handle. NaviModel includes a series of pipe digitising tools that (based on the DTM, raw points, pipe characteristics and mathematical models) can identify the pipe location. These can even be combined with other pipe detection tools like data from Teledyne Reson Pipe Detection & Tracking.
The fastest and most intuitive solution is to detect the pipe in the terrain, where algorithms use knowledge about pipe diameter and bending constraints and offers quick search in the entire model.

NaviModel includes tools for finding and digitising the pipe automatically
In some difficult areas – or if data coverage is not suited for terrain models – you may step back and use a scan-based method where the pipe location will be determined on a scan-by-scan basis, either as cross profiles or physically observed scans. The pipe detection can be based on simple top point detection, pipe shape recognition or a different mathematical nth order polynomial detection.

Scan-based placement of top of pipe based on top point and shape recognition
No matter which data and methods are being used, you can (and will, most often) run it through a smoothing algorithm that combines the observations with the bending constraints to get a more realistic pipe location and to provide confidence numbers for the final result.
As a bonus, you may also use this smoothed pipe location to improve the terrain model – but that is a completely different story.

NaviModel includes many statistical tools to smooth the otherwise noisy pipe location data
Pipeline inspections are costly – not just because of the vessel and equipment cost, but also because of the data processing needed due to the large amounts of data.
Modern pipeline inspection packages therefore must include automation features so that the data processer can focus on the tasks that cannot be automated.

Quality control events such as gaps in the sensor data are fully automated
Automated features include features for quality control, such as finding gaps in the data sets, which is extremely useful during online data acquisition so that resurveys can be made before leaving the area.
Other features, such as automatic detection of free span, increase efficiency for the data processer.

More complex processes such as finding, marking and measuring rocks are also automated (data courtesy: MMT AB)
Some data processing tasks are very large – as an example, we had a customer who needed to deliver rocks/boulder registration in order to assess the cost of trenching. The result was 50,000 rocks and boulders registered and measured – a task that took several months for a team of data processers. This inconvenience made us develop our automated rock eventing feature that does all the work by itself – a small thing, but a tremendous cost saver for our customers.
EIVA’s software development increasingly focuses on automation of as much of the data processing workflow as possible. New tools are being implemented for release in 2017 that will drastically change the way data processing is handled in our software. Moreover, we have recently expanded our software team with roles dedicated to exploiting the benefits of deep learning algorithms for automation.