To use this site, please enable javascript
To use this site, please enable javascript
Cameras transform 3D environments into 2D visualisations, while techniques like VSLAM (visual simultaneous localisation and mapping) and photogrammetry take those 2D visualisations and turn them into digital 3D representations, such as point clouds or 3D textured mesh models.
The ability to generate 3D reconstructions, or digital twins, is a game changer when inspecting critical assets such as those in offshore energy or civil infrastructure. This data type can facilitate engineering assessments based on objectively quantifiable datasets, rather than only producing estimates based on visual assessments. Digital twins can also be leveraged for data consistency and time savings when it is time to repeat an inspection. This is because they can be used to optimise or generate a copy of a previous mission plan, which subsea robots such as ROVs can automatically follow, providing a key for enabling autonomy.
A notable difference between the two techniques is that photogrammetry can only be performed after data collection is complete, while VSLAM performs 3D digitisation at the speed of acquisition. This means that by leveraging VSLAM, tools available commercially such as Voyis’ Discovery Stereo vision system give users peace of mind that optimal data coverage has been achieved, while offering increased situational awareness of the subsea environment – when the user is running Voyis VSLAM Powered by EIVA NaviSuite.
Learn why there are these differences and what this means for your inspection setup in this article…

Simplified illustration showing the difference in method between VSLAM and photogrammetry. In this example, four photos are taken of a subsea object. After the first photo of the object is captured, it is input to VSLAM (left) which uses it to generate a partial point cloud, then repeats the process on the next photo captured and combines that point cloud with the previously generated point clouds in real time – the process repeats as each photo is captured. Photogrammetry (right) takes the pile of all collected photos and puts them through several steps of offline processing to generate a point cloud, then meshes the model and finally textures it.
VSLAM algorithms are able to work in real time because they work iteratively. Essentially, VSLAM processes each image one after the other in a series. It generates a 3D point cloud which expands in accordance with the acquisition process, providing a continual overview of the completeness of data collected, in addition to the 3D representation of the environment, the position and attitude of the vehicle and a track of the flight path. These displays can be used for example by an ROV pilot to navigate complex environments, optimise flight paths and improve tether management.
Photogrammetry algorithms, on the other hand, compute all the images of the dataset together in one go, one step at a time. These steps are typically: feature extraction, image matching, feature matching, structure from motion, depth maps estimation (at which point the solution yields a point cloud like the one VSLAM generates), followed by meshing, texturing and localisation. These steps lead to the generation of a 3D textured mesh model.
.png)
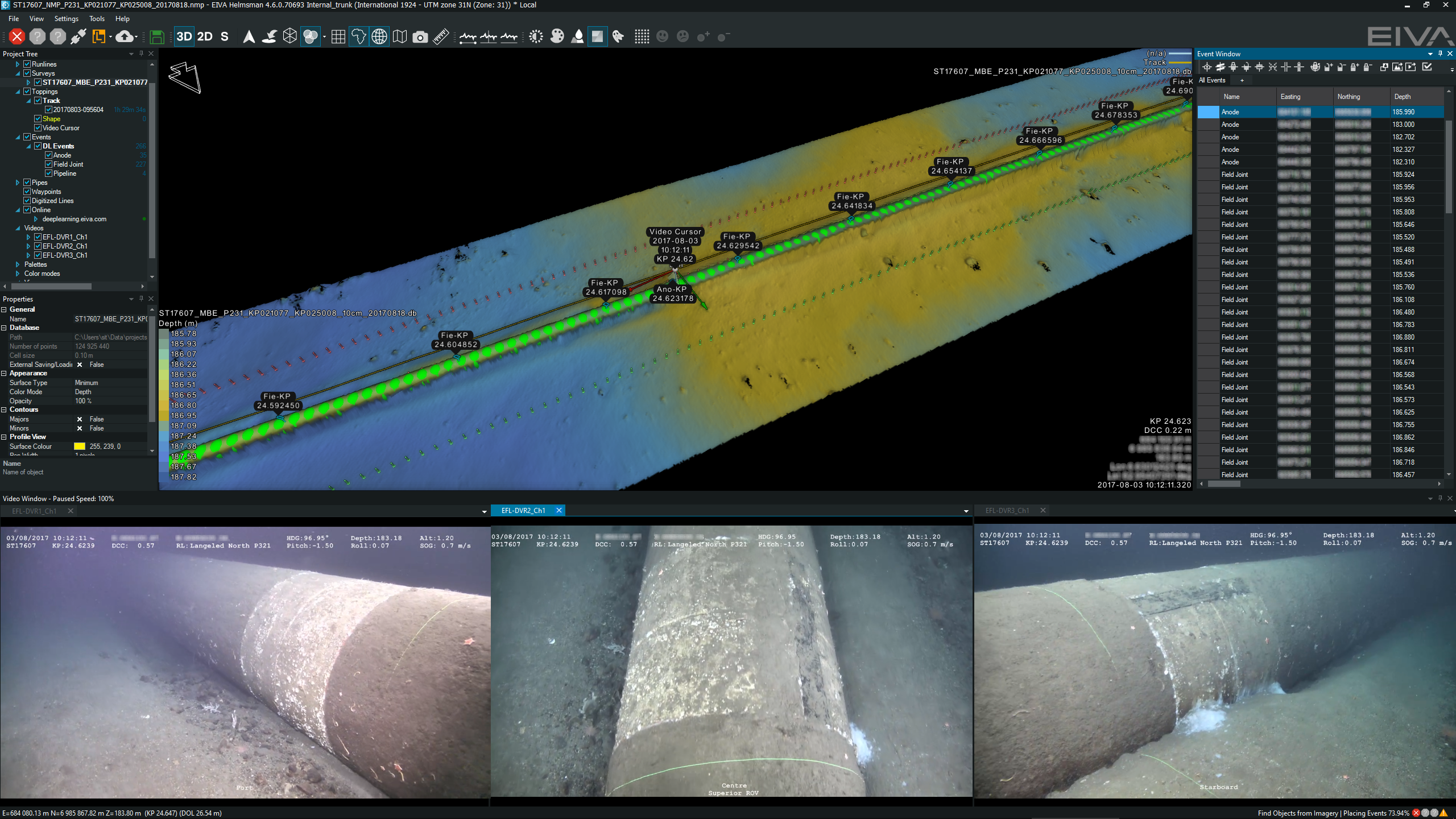
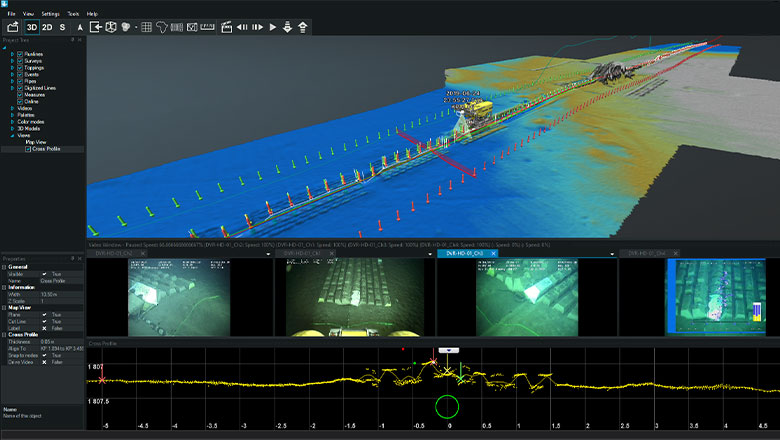
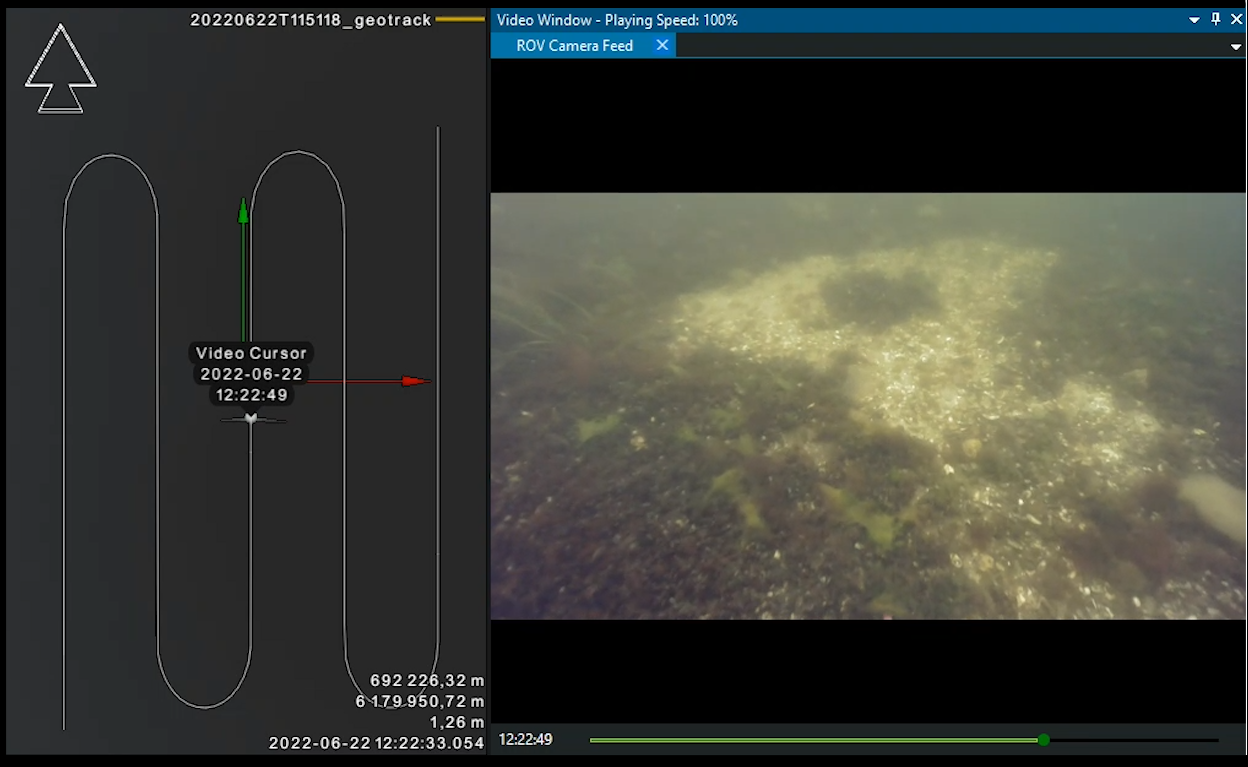
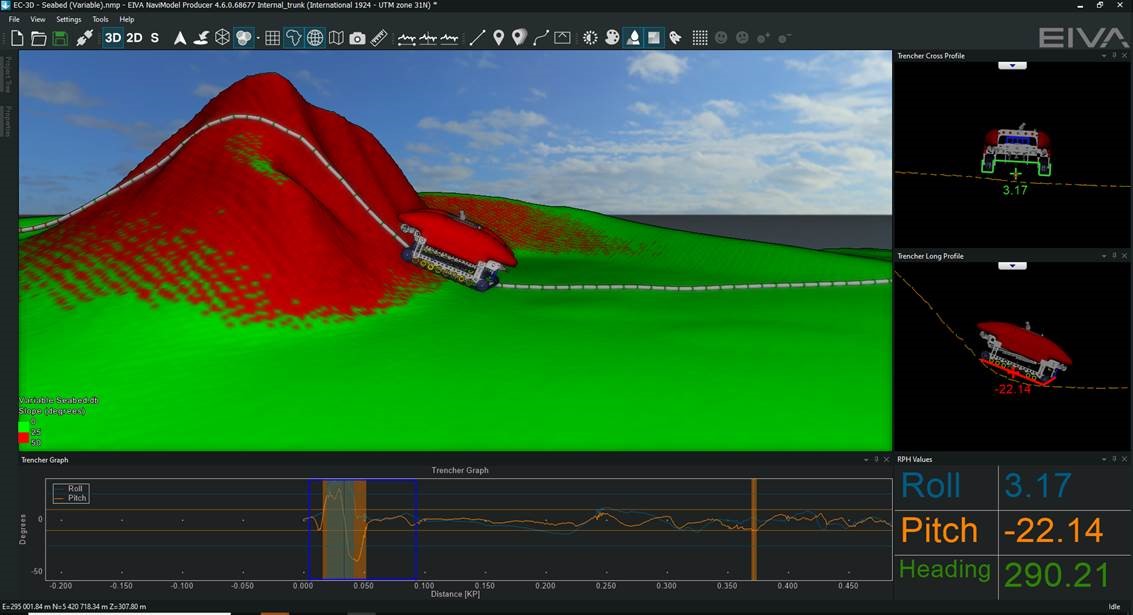
Voyis VSLAM Powered by EIVA NaviSuite provides a user interface with customisable views of the environment, such as a video stream (left) and the real-time generated point cloud (right) showing the area coverage progress – in addition, you can see the ROV track (green dots) and current position of the camera (white pose box)

Photogrammetry provides 3D textured mesh models of the full results of the inspection after post-processing has been completed
VSLAM’s incremental processing of one image at a time ensures efficient computation, which makes the generation of real-time 3D point cloud displays possible. These point clouds can help with making assessments based on measurable data – a vast improvement compared to visual estimates made by-eye from images, as is currently common practice.
Compared to photogrammetry, the incremental nature of VSLAM means a trade-off of on accuracy for speed. By using all the images in the dataset as input at the same time, photogrammetry can achieve much more accurate 3D models. Because photogrammetry solutions compute all photos together regardless of the order of acquisition, they can analyse more images with overlap – those that are not acquired incrementally but maybe at different times during acquisition. With more input comes both the increase in resolution, but also longer computation times.
By including the Voyis VSLAM Powered by EIVA NaviSuite software, Discovery Stereo systems enable you to leverage your camera data fully, every step of the way. This is because ROV pilots and surveyors can employ the software to optimise their flight path and confirm that optimal data coverage has been achieved, after which it is simple to export the area of the dataset you wish to post-process, eg by inputting the data to a third-party photogrammetry solution to generate a 3D model for data delivery.
Note that while we have outlined current differences and similarities between photogrammetry and VSLAM, techniques like these are constantly innovating and taking inspiration from each other. For example, at the time of writing, several photogrammetry methods on the market are running not only the classic steps of photogrammetry described earlier, but also integrating VSLAM algorithms into the processing steps.
Additionally, VSLAM methods benefit from adopting elements of photogrammetry methods – for example, when Voyis VSLAM Powered by EIVA NaviSuite performs loop closure to improve the point cloud reconstruction quality, it can use images from different points in the dataset, regardless of when they were acquired.
Stay tuned to learn more about this in an upcoming article – as we dive into the details of Voyis VSLAM Powered by EIVA NaviSuite.