Let software do all the hard work
Software and payload computers for AUV onboard processing, as well as offline post-processing
EIVA offers several unique capabilities focused on autonomous underwater vehicle (AUV) operations – both software and hardware – as a result of our vision to provide technology for fully autonomous subsea inspection operations and processing.
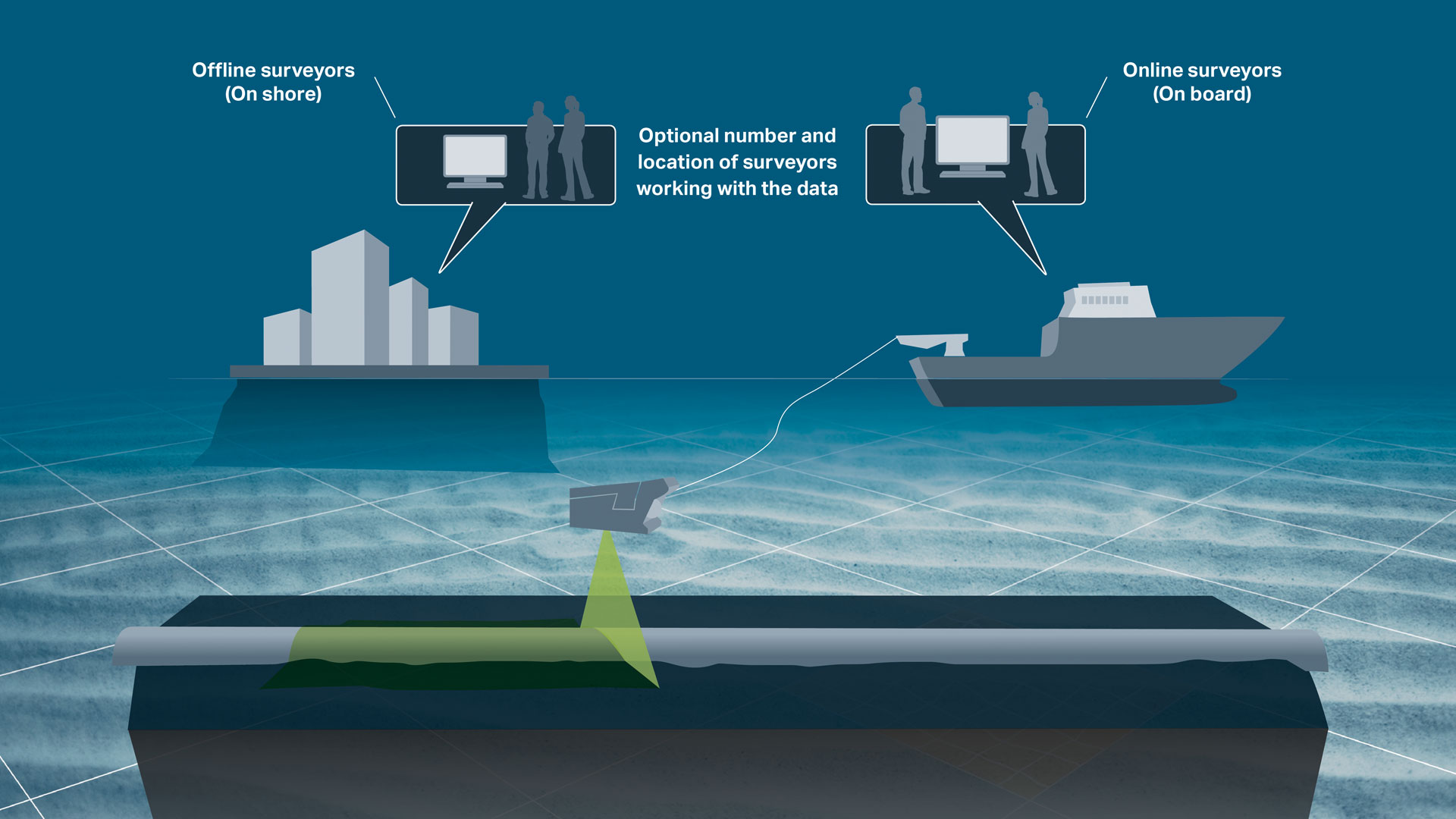
One challenge with AUV-based operations is that typically there is very little communication available – this means that a lot of data needs to be either processed onboard the AUV during the mission or after recovery of the AUV.
EIVA offers the fastest data processing software for AUV operations available, NaviSuite Nardoa, which enables automation of the majority of sensor and sonar data processing, as well as combining high-speed vessel-based processing with onboard AUV processing.
The acquisition and processing software can be linked to the AUV control system and thus pass real-time observations, alarms and valuable QC information on to the control layer and/or topside monitoring system.
Our Autonomy development team focuses on applying deep learning, AI and computer vision/VSLAM to our industry, and we offer automated object detection, camera-based navigation, pipe tracking and much more based on latest technologies.

Key features
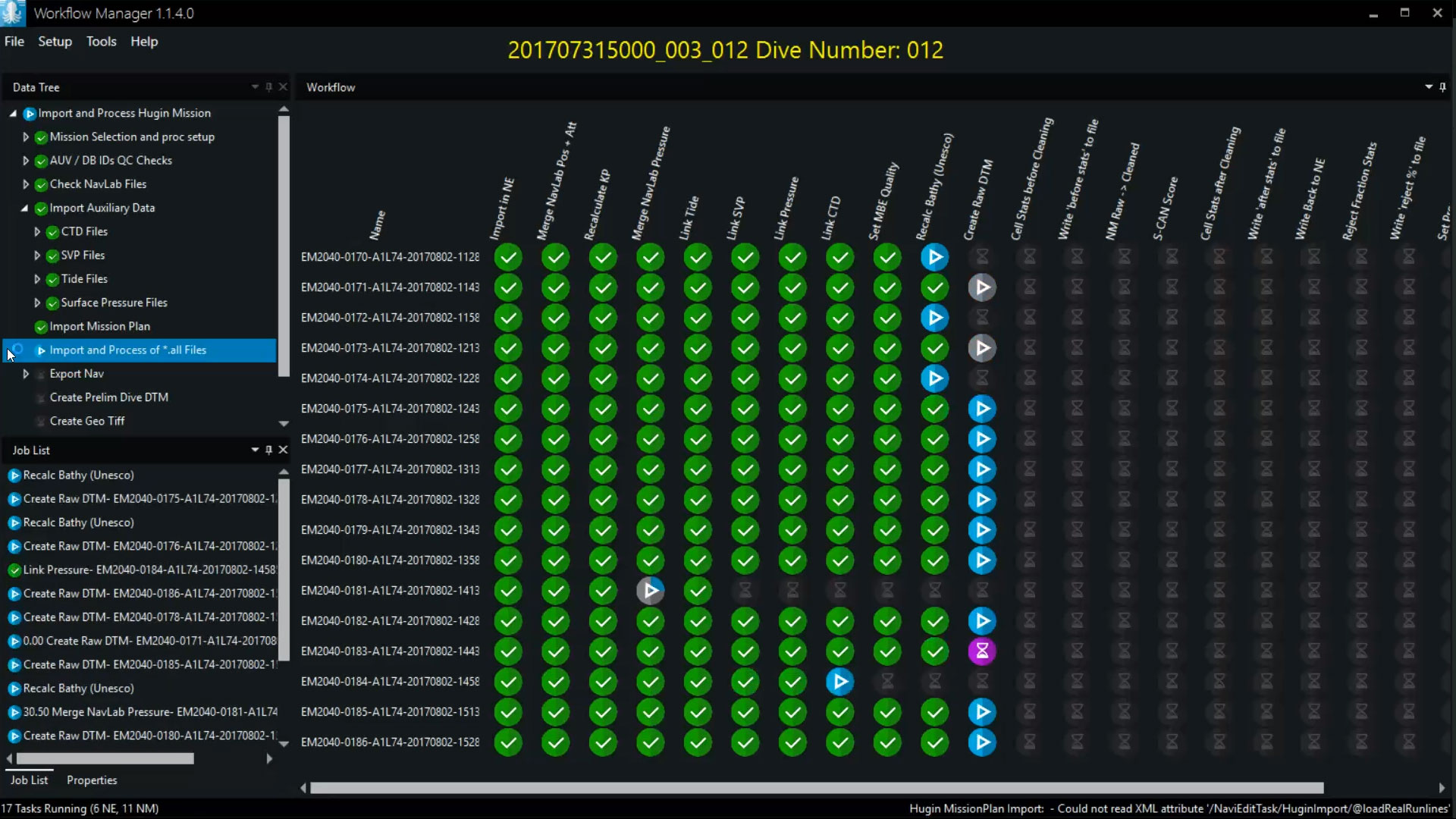
- High-speed data processing, where our Workflow Manager server software offers unmatched processing times after recovery of the AUV. For example, 50 hours of data can be processed in less than 2 hours.
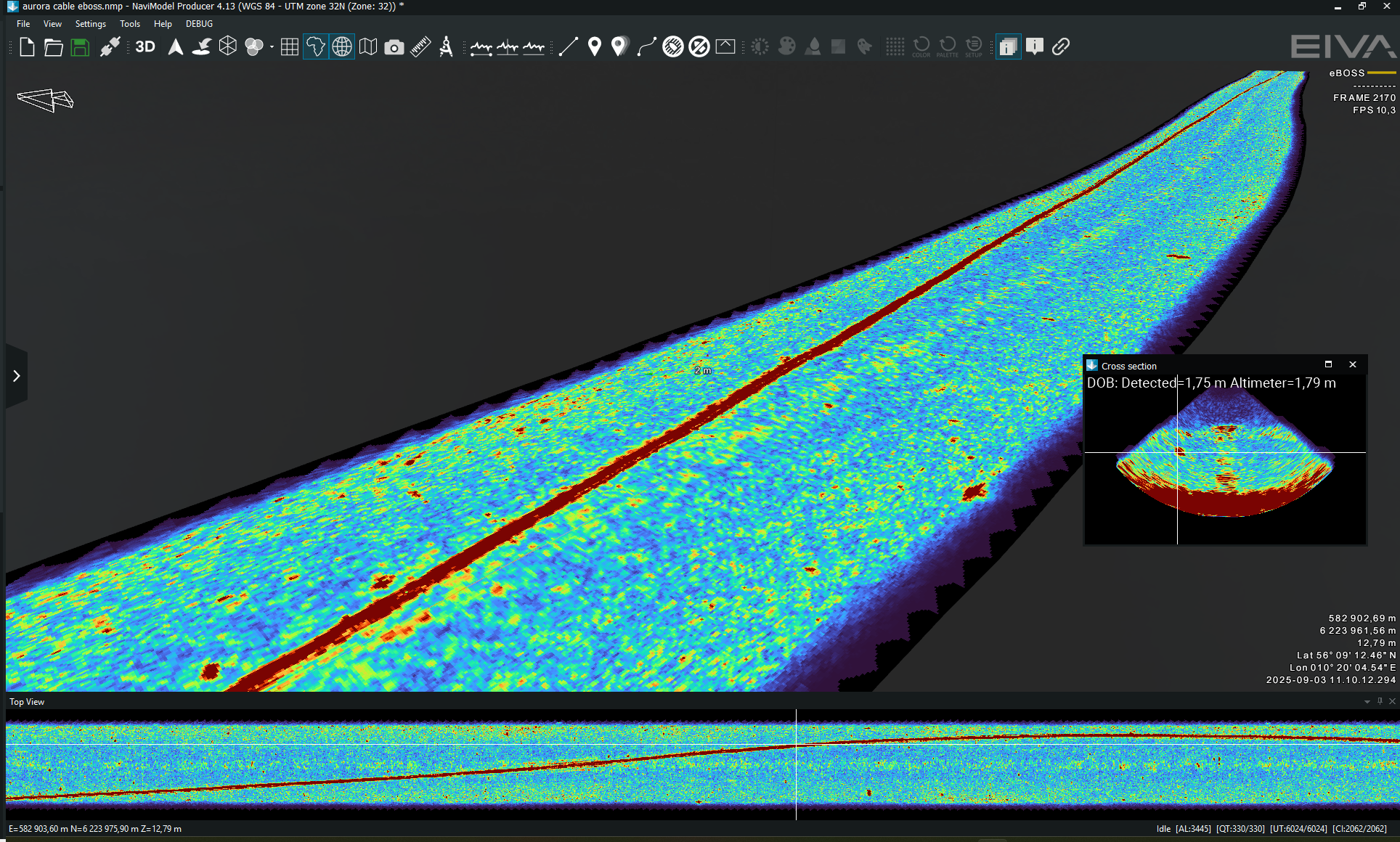
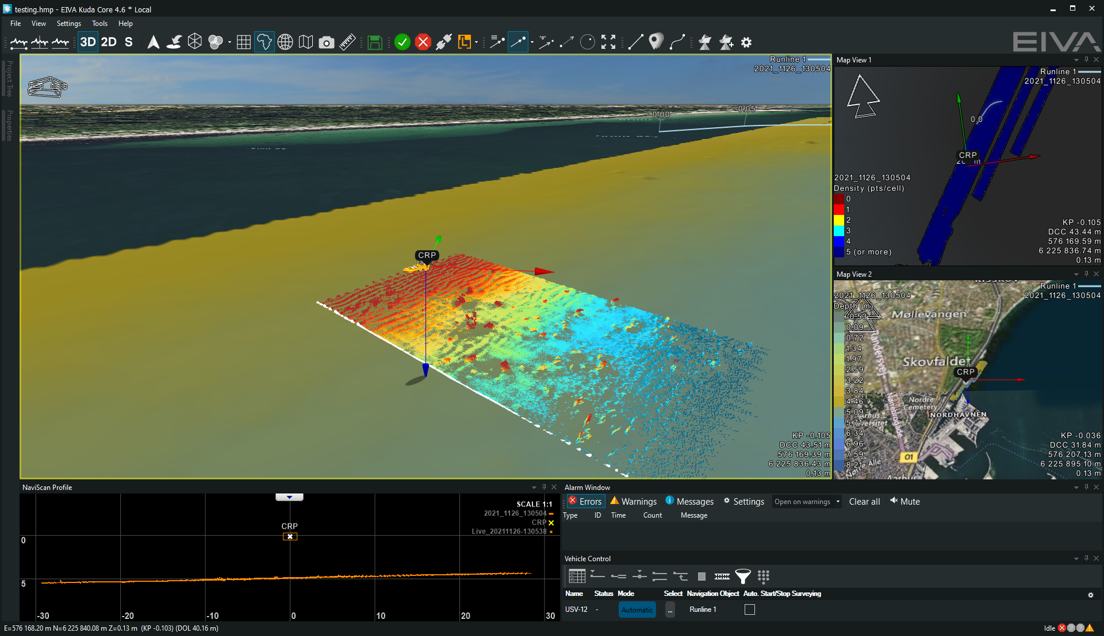
Onboard real-time data acquisition and interpretation, where NaviScan can be executed headless and interfaced with sensors and the AUV control system for integrated acquisition and QC.
Visual pipe tracker, where our NaviSuite software can run on the AUV, connected to the AUV camera and in real time detect the pipe, provide video QC, and provide top of pipe to the AUV control system.
Sonar-based pipe tracker, where NaviScan performs real-time detection of the position of an exposed pipe by applying an algorithm to MBES or laser data. This detected position can then be fed into the AUV’s control system for pipe following.
- Automated visual eventing, where our NaviSuite software can automatically perform event registration of object types such as pipe, field joint, anode, damage, debris etc – using the camera in real time. Either as a development project and/or through third-party AI models. This can be used to redirect the AUV to gain more data on points of interest, or simply to save processing time.
A Microsoft Windows-embedded payload computer is available for acquisition and onboard processing.