






Key features and benefits

Cutting a long inspection story short: What you get...
Dive further into the details of how NaviSuite Mobula will optimise and automate your ROV inspections.
What you get...
Choose the bundle variant that matches your vehicle setup and your budget
… ranging from variants dedicated to the essentials of performing inspections – all the way to NaviSuite Mobula Pro + Processing for advanced positioning setups, data fusion and reporting results with comprehensive data deliverables such as 3D modelsImproved situational awareness
… through a highly configurable user interface that is easy to tailor to your needs, bringing all relevant features to your monitor – including simultaneous views of 2D, 3D and 4D model visualisations, as well as real-time quality control toolsDive once and bring back all you need
… through data fusion capabilities allowing you to acquire and visualise data from the many supported sensors simultaneouslyBring autonomy onboard your ROV
… through assisted steering modes that make use of the wide range of positioning sensors supported and strong thruster control – these modes include going to a selected waypoint, moving a defined distance and direction, for example when scanning quay walls, orbiting a target, as well as holding a positionIncreased precision of data
… through seamless interfacing between hardware and softwareReport results easily and clearly
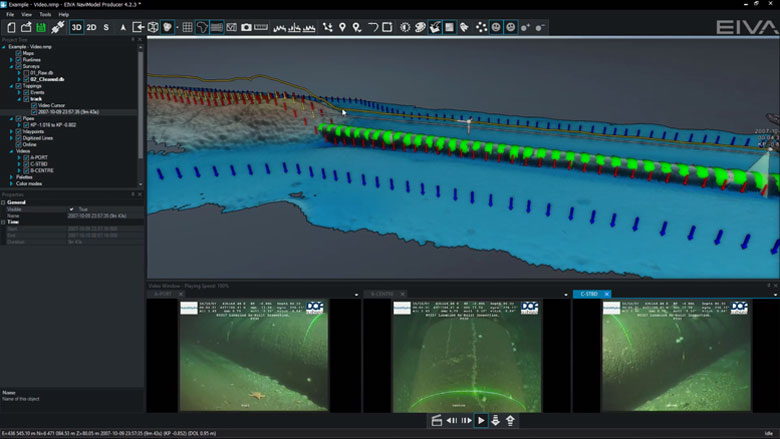
… with comprehensive data deliverables such as fly-by videos, which are integrated with an easy to use observation log tool – additionally, with the + Processing variant, you can generate 3D visualisations which your end-client can work in using the free NaviModel Viewer or the more advanced solution NaviModel Analyser.Overview at any time
… by combining all the data collect in one streamlined solution, you can replay your video recordings while showing where your ROV was at the exact time it was recording that video – if you are using the + Processing variant, this position can even be shown on the 3D model generated from your inspectionAutomatic data processing (only available in the + Processing variant)
…. by enabling you to set up an automatic workflow in Workflow Manager, letting the software do the hard work even for massive amounts of data – with processing tools such as EIVA’s automatic data cleaning tool EC-3D which you can even run in real time during acquisition, so your 3D model can be automatically cleaned and ready to deliver by the time you’ve retrieved your ROVTaking your ROV inspections to the next level
NaviSuite Kuda is the optimal solution for efficient ROV operations yielding high-quality data deliverables. This could for example be inspections of offshore wind turbine foundations, harbours and subsea assets, as well as UXO surveys and habitat mapping.
This NaviSuite solution dedicated to ROV inspections draws on the powerful features of the NaviSuite software family. It provides cutting-edge software technology enabling automated operations – all at an affordable price.
Take a test dive – Get a free 30-day trial package
EIVA offers all new users the opportunity to experience the benefits of NaviSuite Mobula first hand onboard your ROV with a free trial of the NaviSuite Mobula software, no strings attached. Feel free to reach out if you are interested.
Other ROV models can join the NaviSuite family
Note that while NaviSuite Mobula is available as a plug-and-play solution for Blue Robotics BlueROV2 and VideoRay Defender ROVs, it can be integrated with any ROV – requiring just a little coding by the EIVA crew.
-
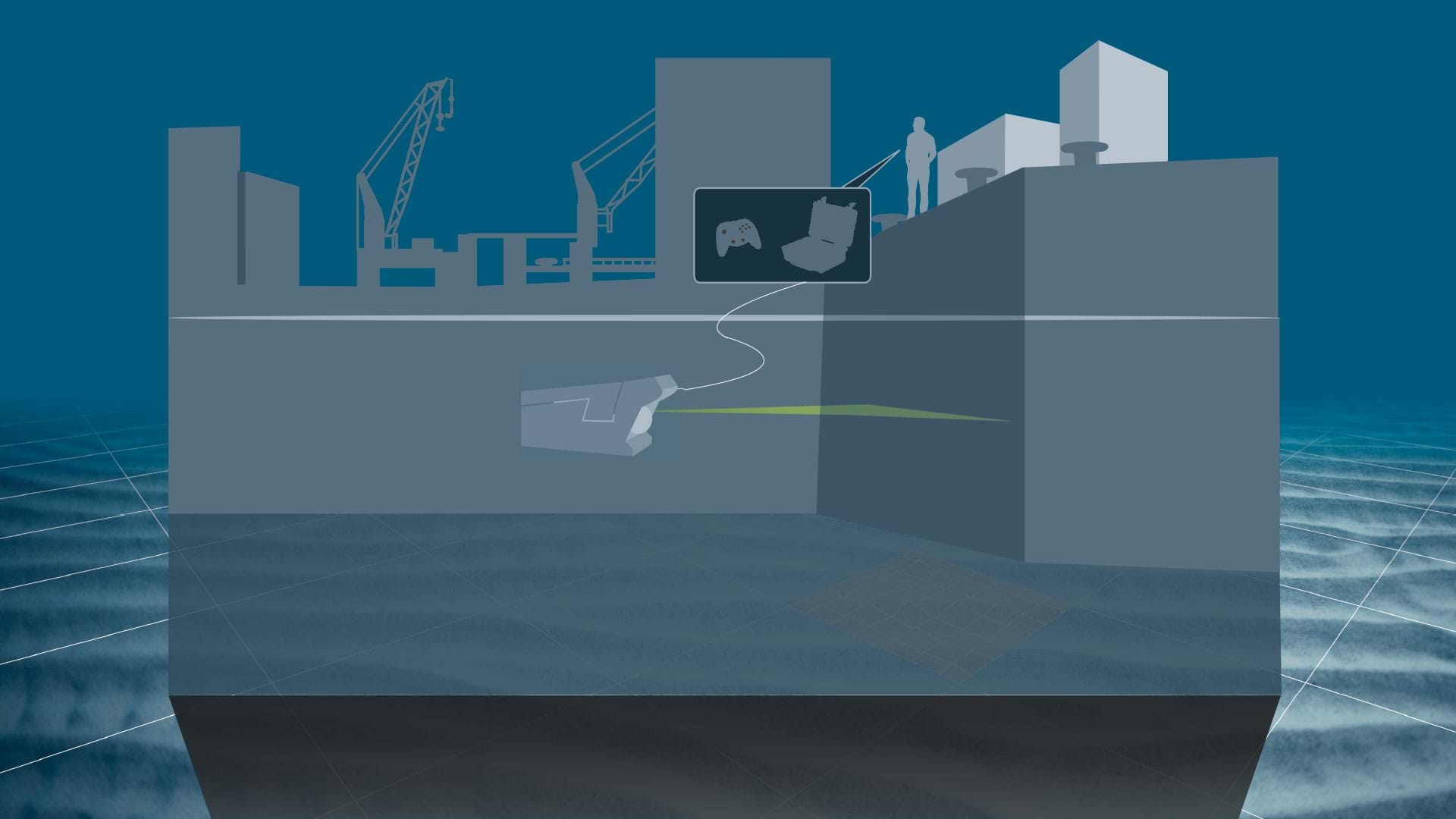
ROV steering
NaviSuite Mobula allows users to control various ROV models. Templates can be selected to help with setup for different scenarios and users can steer the ROV while utilising video feeds, eventing and sonar for inspections.
ROV steering features
NaviSuite Mobula allows users to control various ROV models. Templates can be selected to help with setup for different scenarios and users can steer the ROV while utilising video feeds, eventing and sonar for inspections.
ROV joystick steering
ROVs can be controlled using joystick with NaviSuite Mobula.
Auto-depth and auto-heading
Depth and heading are automatically calculated.
-
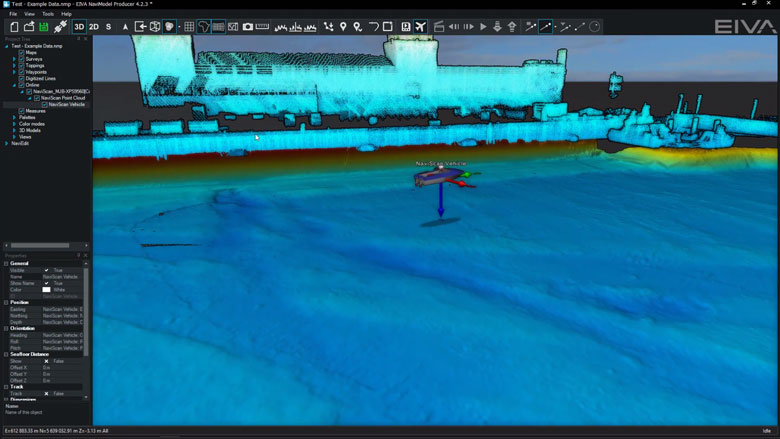
General visualisation
NaviModel and NaviPac share the same 3D engine, and therefore the same powerful 3D visualisation features. Data can be visualised in 2D, 3D, side view or by time.
General visualisation features
NaviModel and NaviPac share the same 3D engine, and therefore the same powerful 3D visualisation features. Data can be visualised in 2D, 3D, side view or by time.
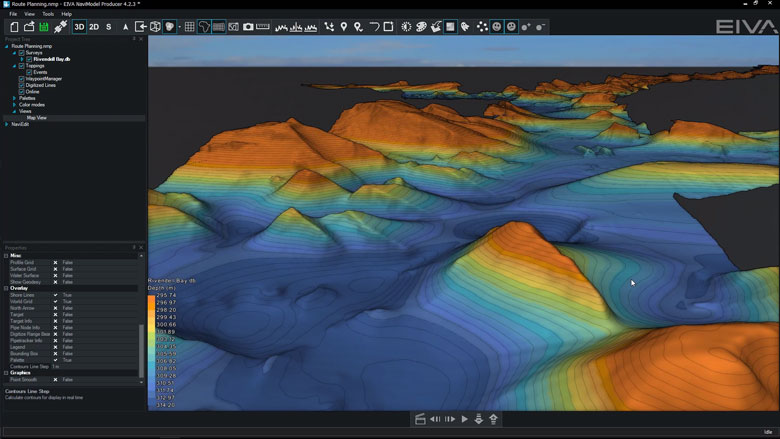
3D seabed terrain
Seabed terrain can be visualised in a 3D environment.
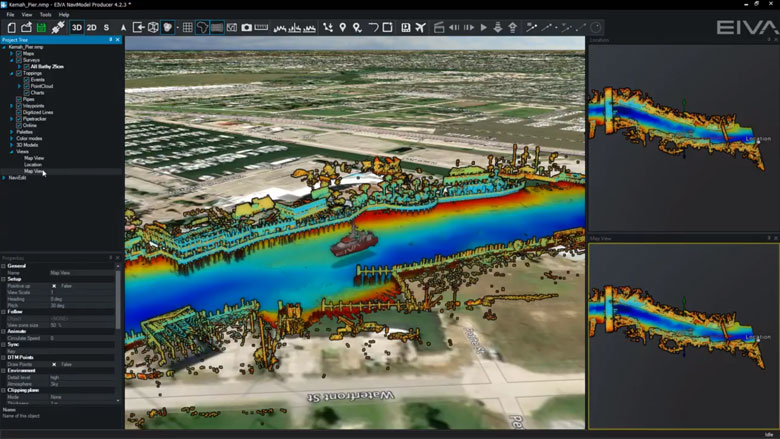
Multiple Map Views
Multiple Map Views are available. Each individual Map View window can be configured separately to display only the information required.
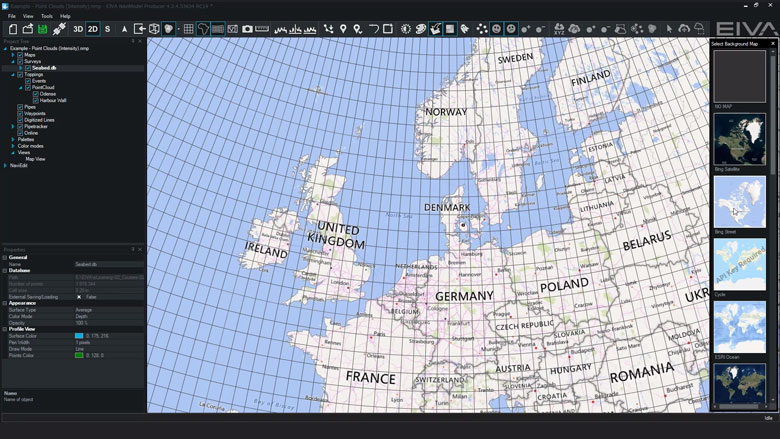
Background Maps
Background Web Map Service (WMS) maps can be displayed.
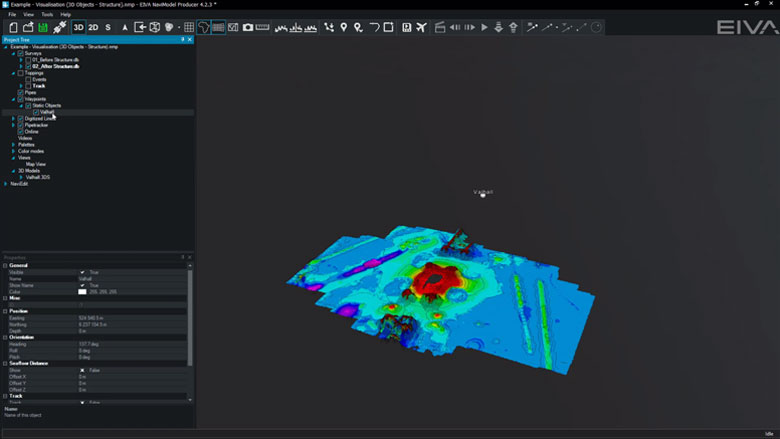
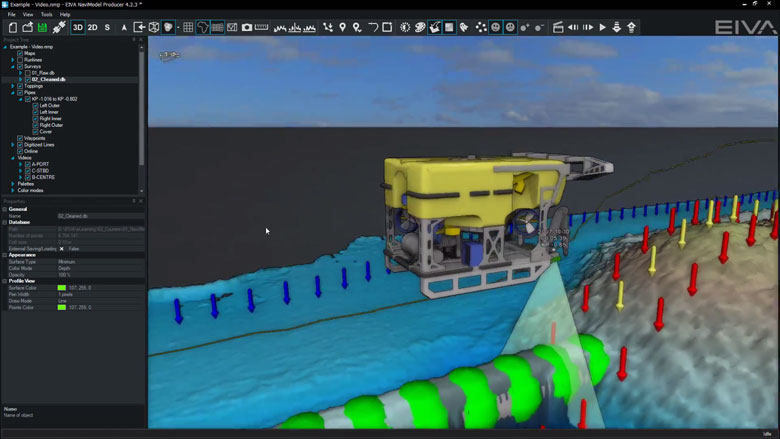
Import 3D models
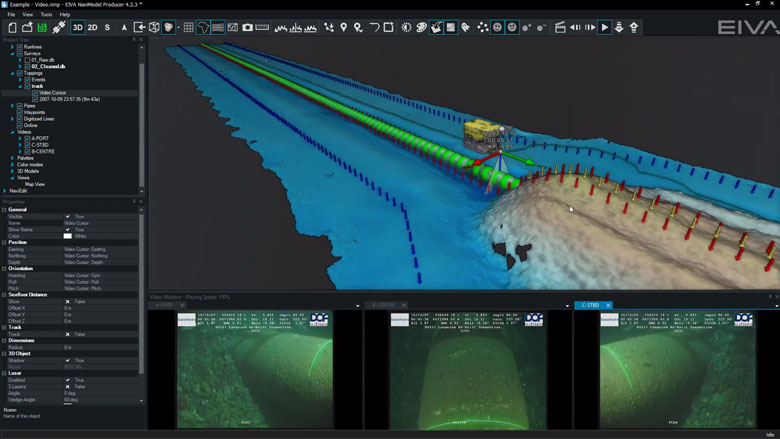
3D models can be imported into NaviModel (drag and drop into the Map View window).
Link 3D models to live objects
3D models can be linked to any live objects (Vessel, ROV, Scanfish etc).
2D, 3D and side-view displays
2D, 3D or Side views allows the user to quickly change the view facilitating better data interpretation.
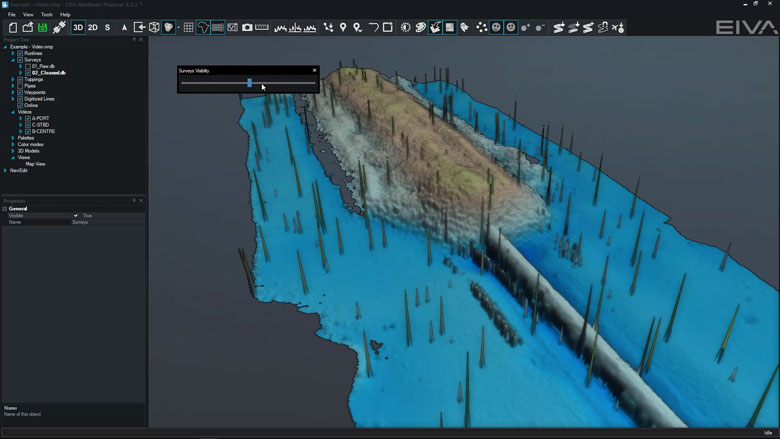
Visibility Slider
Visibility slider allows users to compare different DTM’s quickly. This enables comparison over time or between different data processing methods.
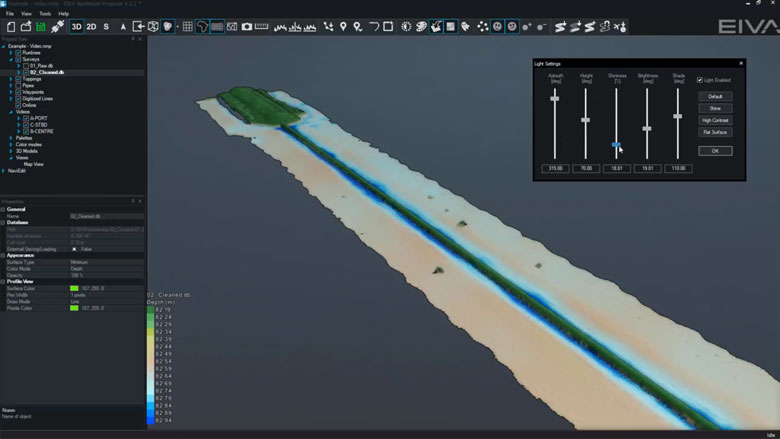
Control colours, lights, details
DTM light and palette settings can be changed at any time.
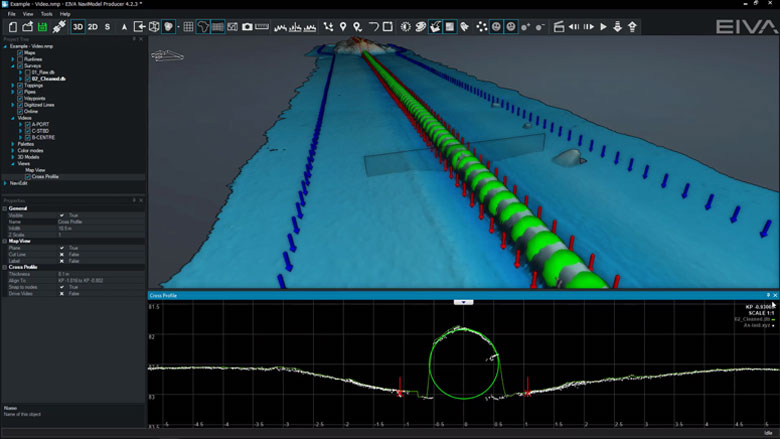
Profile views
The following profile views are available:• Cross Profile• Long Profile• Quick Profile• X & Y Axis Profile• View Profile
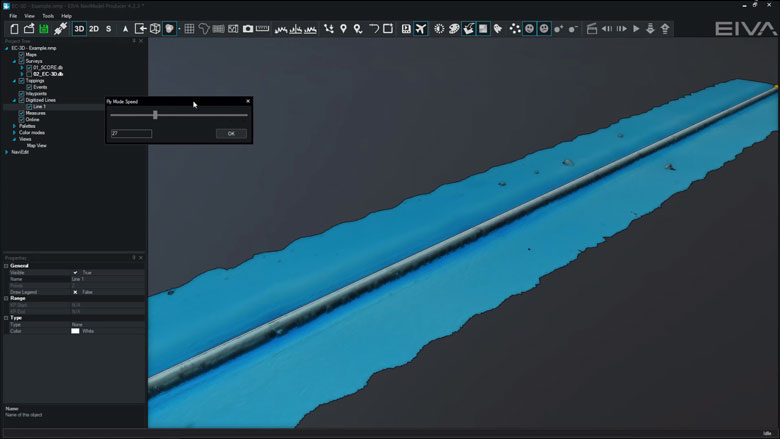
Create fly-through videos
Fly-through videos can be created for project or promotional presentations.
-
Sensor interfacing and recording
Many different sensors can be interfaced and integrated in both NaviScan and NaviPac.
Sensor interfacing and recording features
Many different sensors can be interfaced and integrated in both NaviScan and NaviPac.
Surface positioning and motion (GPS, Gyro, IMU)
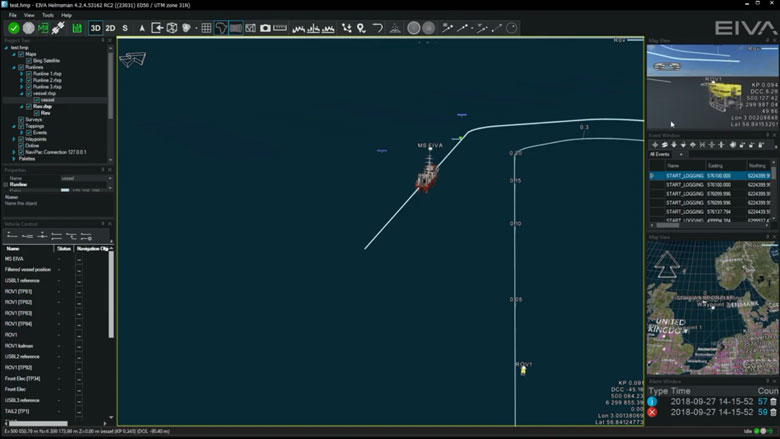
Setting up an entire vessel based project in NaviPac is easy performed using intuitive graphical definition tools. The video covers basic project definition, geodetics and vessel navigation setup.
Subsurface positioning (USBL, DVL, INS, Gyro, IMU)
Setting up remote and subsea vehicles is done in a similar manner to the main vessel – easy and intuitive. Adding instruments, positioning sources (transponders, INS, LBL etx) and defining weighting and Kalman filter settings is possible.
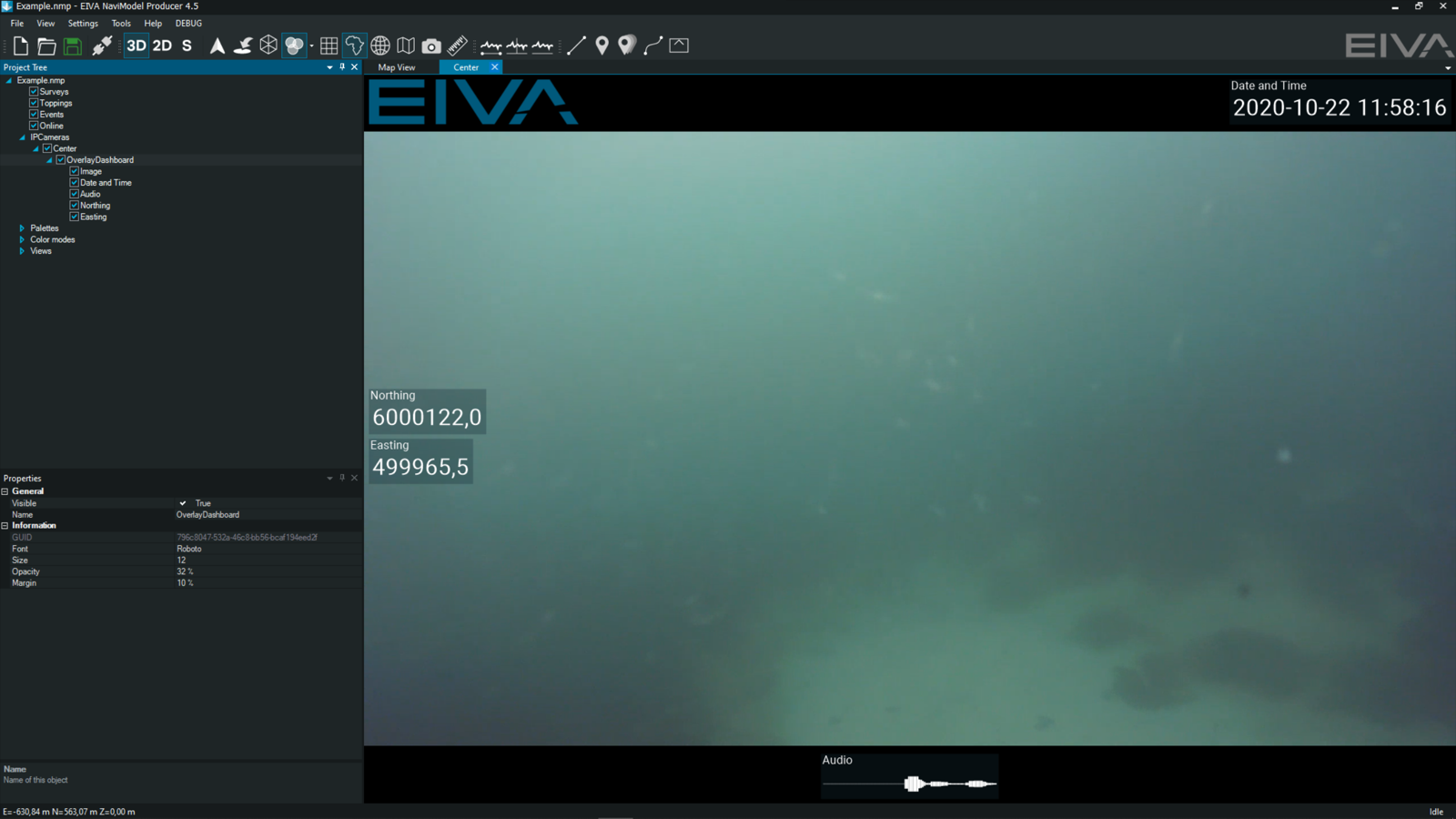
DVR: IP video camera
In NaviPac, you can easily display and record video camera feeds. This free alternative to other DVR systems ensures that you can stream your camera feed directly into NaviPac and that it is recorded in a format you can replay in NaviModel. Overlays which you use during acquisition are saved in separate, synced files, rather than burned in. This means the overlays can be there when you replay the video, or you can remove them.
-
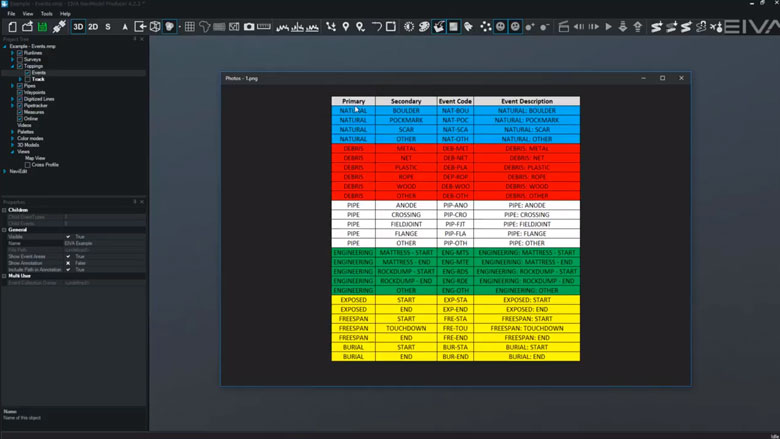
Eventing
The many eventing features include auto-calculation of event types and an easy-to-use event tablet view.
Eventing features
The many eventing features include auto-calculation of event types and an easy-to-use event tablet view.
Configurable event types, hierarchy, and properties
Client and company specific event collections can be tailored to the activity undertaken.
During EIVA Days Denmark 2018, we presented a major expansion to the functionality of camera based scanning.
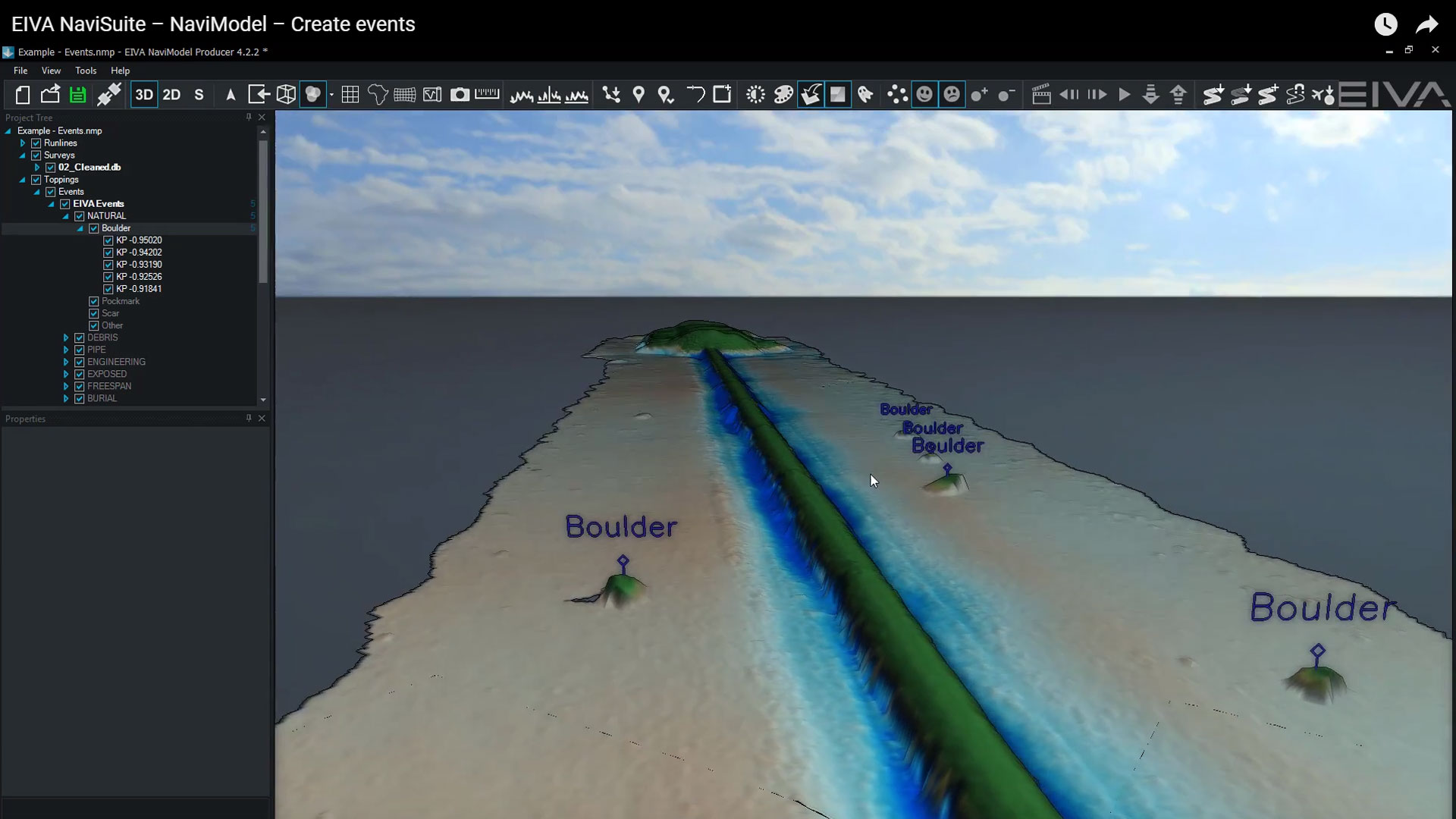
Create events
Events can be created quickly and are automatically placed onto a DTM.
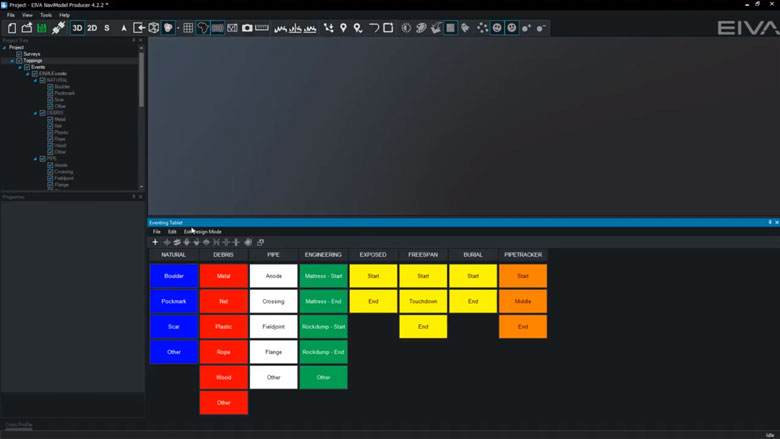
Tablet for fast event creation
Using the eventing tablet view allows for quicker event creation. With the eventing tablet, you can quickly add all events, or customise which events to add with just a few steps.
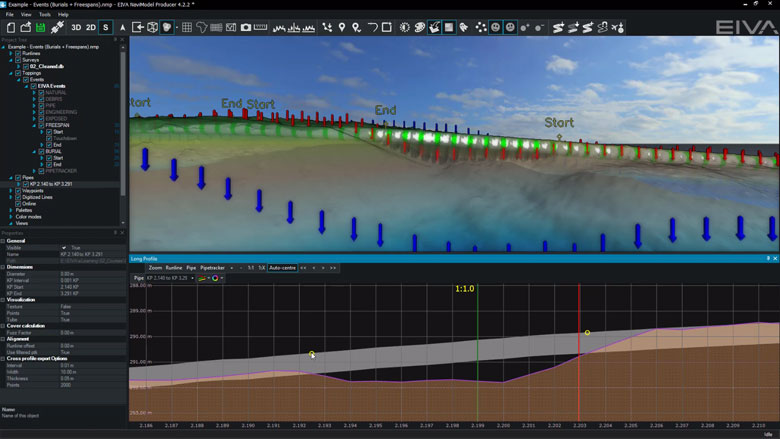
Create freespan and burial events
Pipe and seabed markers are used to create freespan and burial events.
This means that events and seabed markers always tie-in.
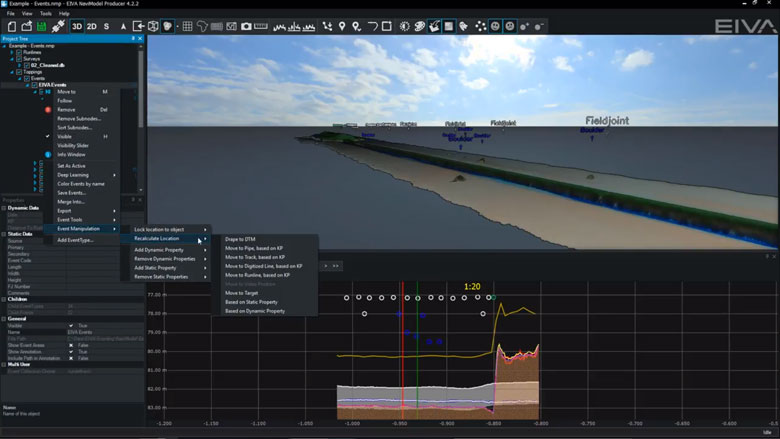
Recalculate events
Events can be recalculated at any time.
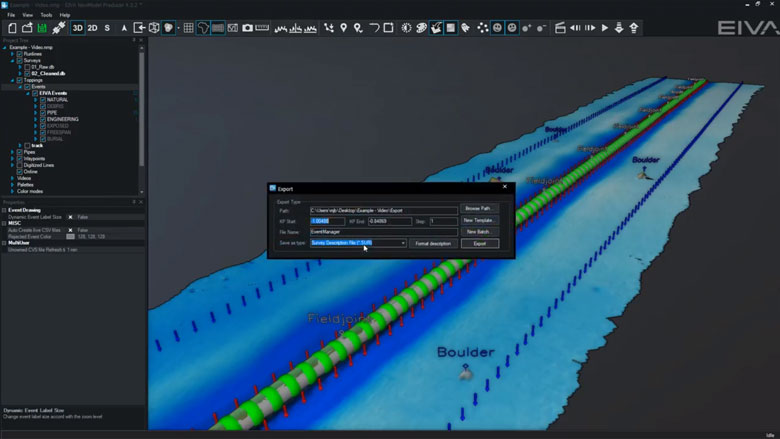
Export events
User configurable templates can be created to export events in the format required.
Export nearest image and videos
Images and videos can be exported for each event or for selected events.
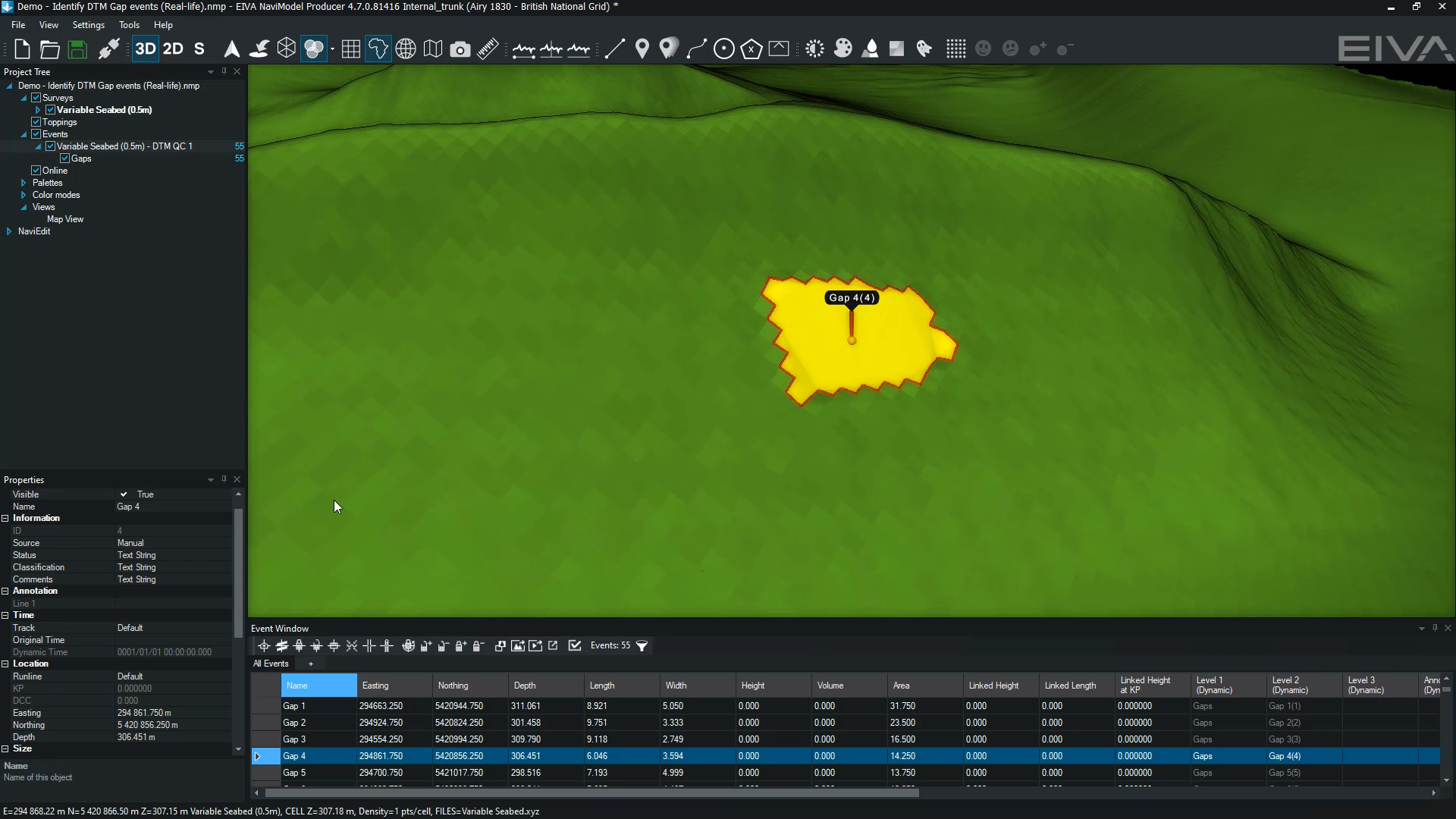
Create pipetracker gap events
Pipetracker gap events are created from continuous sections of rejected pipetracker data.
You can also automatically identify and generate DTM gap events for quality control.
-
Videos and images
Video and still images that contain time stamps can be combined with other data sources in NaviModel.
Videos and images features
Video and still images that contain time stamps can be combined with other data sources in NaviModel.
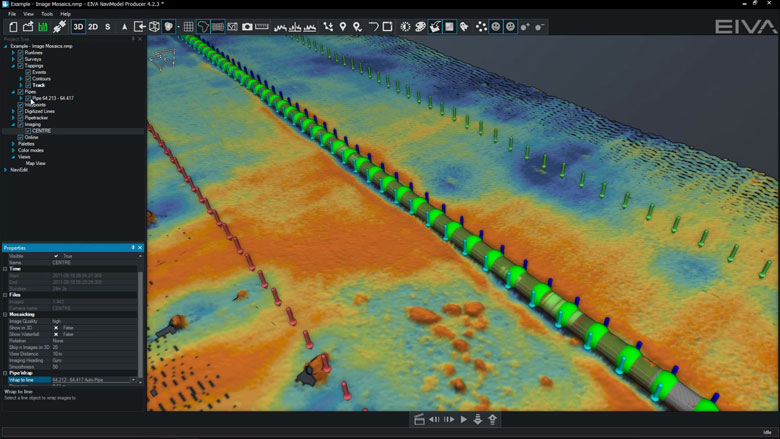
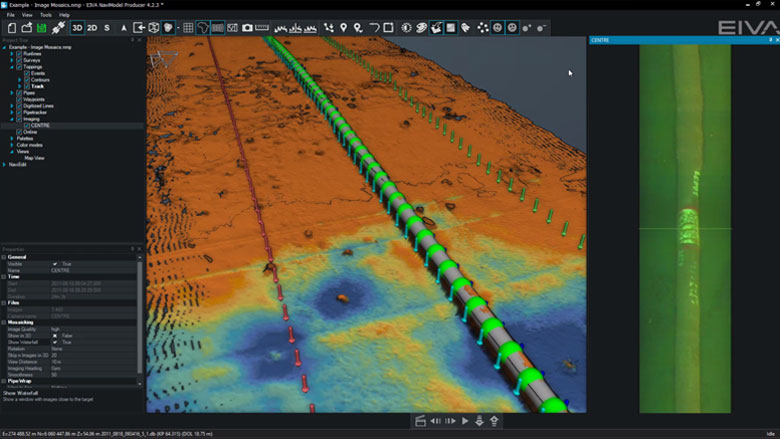
Drape images on digitised pipe
Video images can be wrapped around an existing pipe or digitised line in the Map View window.
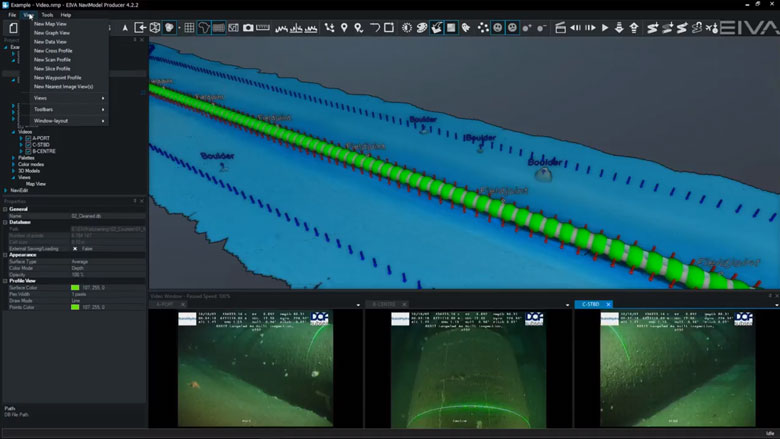
Play and control video
Digital video acquired in external systems can be played and controlled inside NaviModel.
Synchronise video with track
In NaviModel the track contains the date and time and must be synchronised with the video time to enable videos to play.
Normally the video time and track time are recorded in the same time zone. However sometimes this is not the case and we need the option to change the video / track time so that video will play.
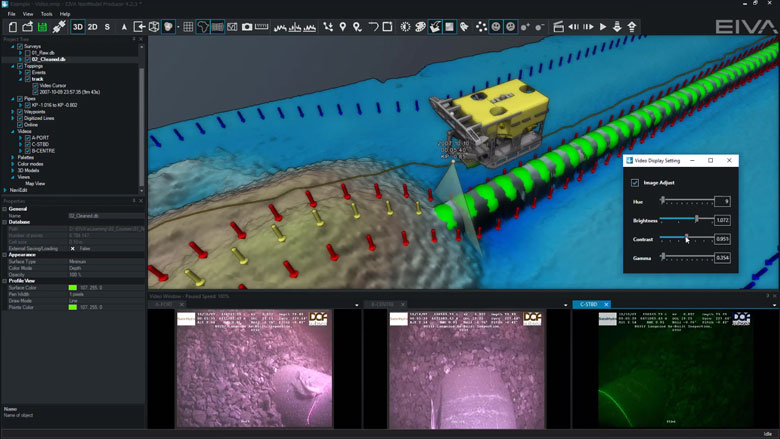
Adjust video hue, brightness, contrast and gamma levels
Hue, brightness, contrast and gamma levels can be adjusted to improve badly lit videos.
Display video images (Waterfall)
Video images can be displayed as a vertical waterfall.
-
Optional extra services and special offers
EIVA offers a number of services for our NaviSuite software users.
Optional extra services and special offers
Get the most out of your software
EIVA offers a number of services for our NaviSuite software users. These include:
- Access to our self-service licence administration and purchase portal, My EIVA
- eLearning, virtual and classroom training
- Software maintenance and 24/7 support programme (Comes free of charge for subscription licences – Learn about the different licence types and the maintenance and support programme)
- Custom development
- Mobilisation/installation – on-site or remote assistance
- Dongle replacement programme for lost or broken dongles for permanent licences
Also, we have a number of special offers:
-
References
‘With this software, my ROV now does everything I was hoping for.’
Take our customers' word for it
'Our ROV’s flight characteristics are amazing when using the control software in NaviSuite Mobula. With this software, the ROV now does everything I was hoping for.'
Kelsey Treloar, co-managing director at Southern Ocean Subsea PTY Ltd.'We have been using NaviSuite Mobula for our ROV (BlueROV2) for 9 months or so and in that time, we have used it for several successful projects. The setup is user-friendly, and we’ve received great support. We like the piloting features like auto depth and auto heading, as well as capabilities like recording footage, integrating navigation equipment (USBL), extra settings for adjusting gain and displaying a variety of information on the screen to help the pilot.'
Paul Storey, ROV supervisor and director of Below and Beyond Ltd.
‘During our August 2022 field campaign, we successfully tested the EIVA NaviSuite Mobula Sonar software’s automatic and assisted steering capabilities including Keep Distance. Using this steering mode, with data collected by the Ping360 in real time, our ROV could hold its position relative to an iceberg a specified distance away.
We received exceptional support from the EIVA team in getting the software to meet our group's specific needs for our first field campaign and we believe that this software has the potential to increase the capabilities of the ROV for studying glacier melt. Our next steps will be to continue to work with EIVA to explore how we can use data from other instruments mounted on the ROVs, like DVLs and underwater acoustic beacons, to increase our control of the ROVs.’
Nadia Cohen, Graduate Student at Oregon State University




Product comparison
Related products
-
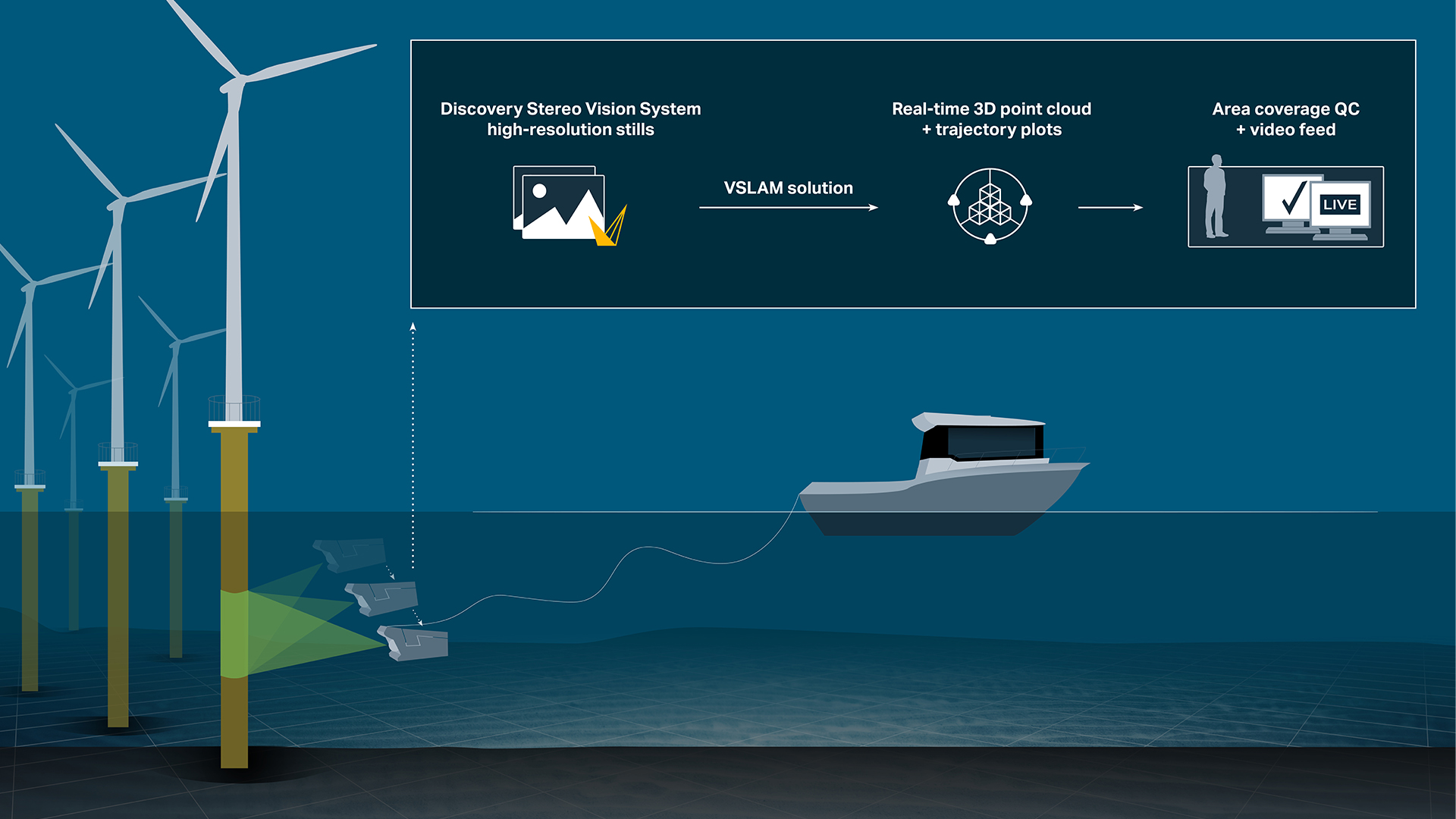
Voyis VSLAM Powered by EIVA NaviSuite
Comes standard with Voyis’ Discovery Stereo Camera – Real-time 3D point clouds & navigation trajectory plots – Area coverage & data quality control displays.
-
NaviSuite Mobula Pro (VideoRay)
Plug-and-play ROV control and inspection software with advanced features for manual and assisted steering – Automated inspection tools – Supports data fusion of all relevant sensor types – Video replay and logging observations
€ 80.00/day€ 4,950.00/year€ 14,850.00/permanent -
NaviSuite Mobula Pro + Processing (VideoRay)
Advanced ROV control and inspection software – Excellent control through manual and assisted steering – Automated inspection tools – Supports data fusion of all relevant sensor types – Data processing for comprehensive reporting
€ 147.00/day€ 9,083.00/year€ 27,250.00/permanent -
NaviModel Analyser
Basic processing, visualisation and analysis of data in 2D, 3D and 4D.
€ 25.00/day€ 1,517.00/year€ 4,550.00/permanent