

Key features

Cutting a long survey story short: What you get
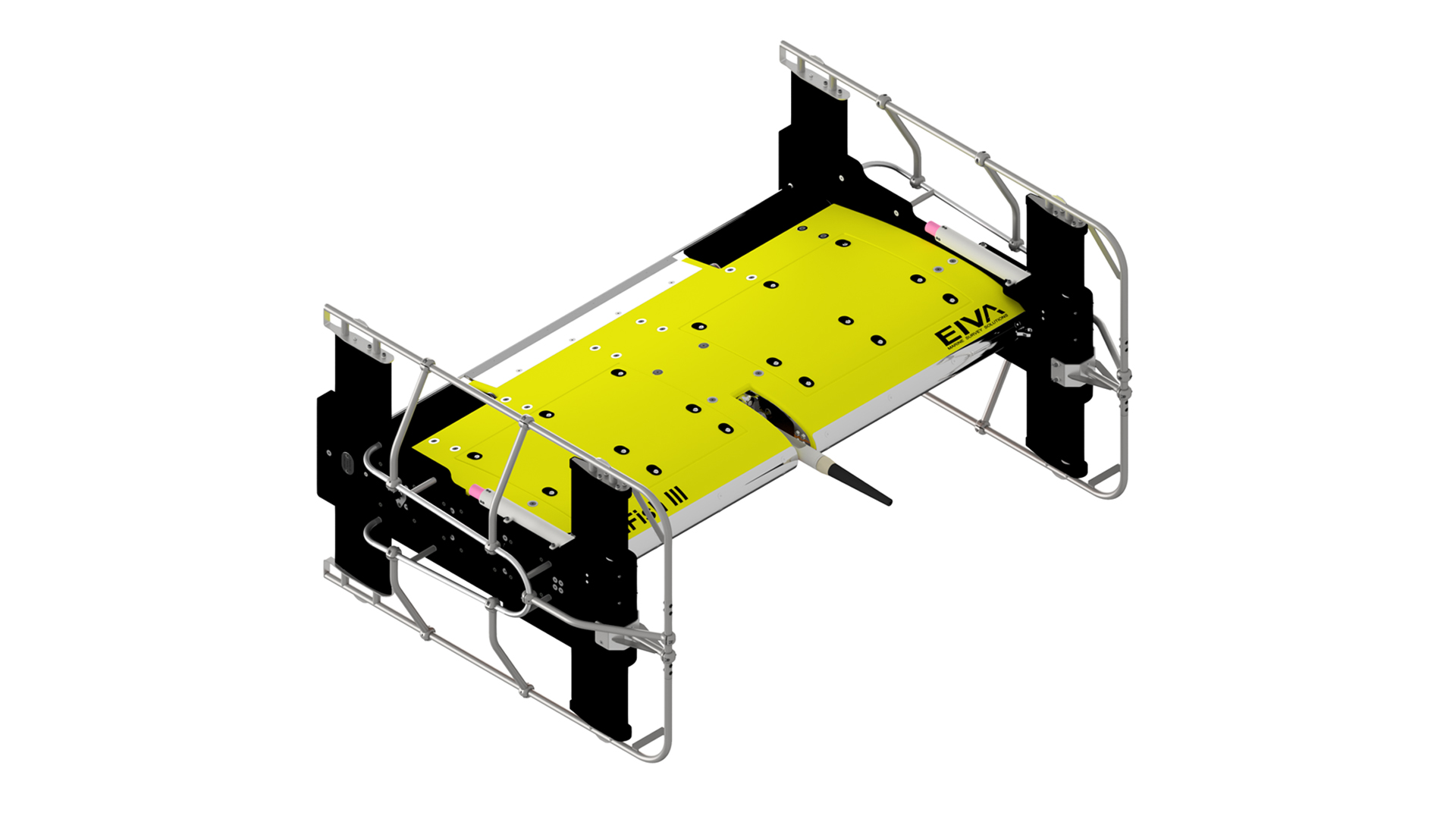
ScanFish Katria is an Intelligent wide-sweep ROTV for magnetometer surveys.
Cutting a long survey story short: What you get
ScanFish Katria is an intelligent wide-sweep ROTV for magnetometer surveys
Effective magnetic anomaly detection
... through optimal positioning of multiple magnetometers
Reduced survey time
... through wider magnetometer coverage in one sweep
Monitoring and complete control of the remotely operated towed vehicle
... through the user-friendly ScanFish III Flight software
A long service life
... through quality materials, robust design and easily replaced wear parts
A potential turn-key magnetometer survey solution
... through a complete list of optional extras
Affordable survey setup
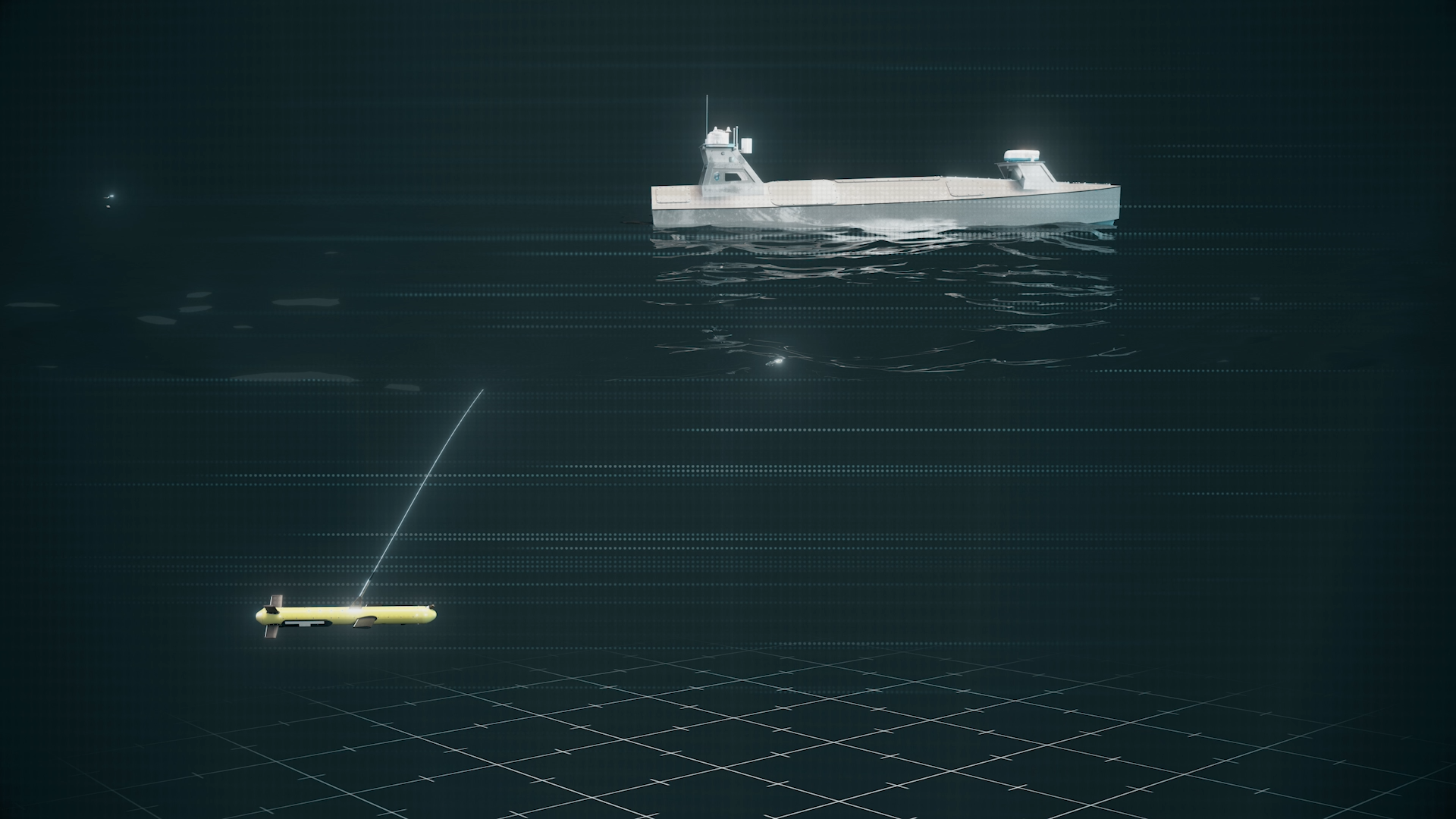
... through the fact that the ScanFish Katria is towed at a distance which means that any type of vessel can be used without risking the survey data being affected by its magnetic signature
Try before you buy
... through the possiblity of renting the ScanFish Katria on a weekly or monthly basis‘Very reliable system for high-resolution magnetic detection.'
Project Manager / Geophysicist Dr Anne Chabert
Fugro EMU-
Easy deployment and operation with wide and dense coverage
The ScanFish Katria ROTV and four magnetometers are easy to deploy with an A-frame and operate in the ScanFish Flight software.
Easy deployment
The ScanFish Katria ROTV and four magnetometers are easy to deploy with an A-frame.
Deployment of the ScanFish Katria ROTV
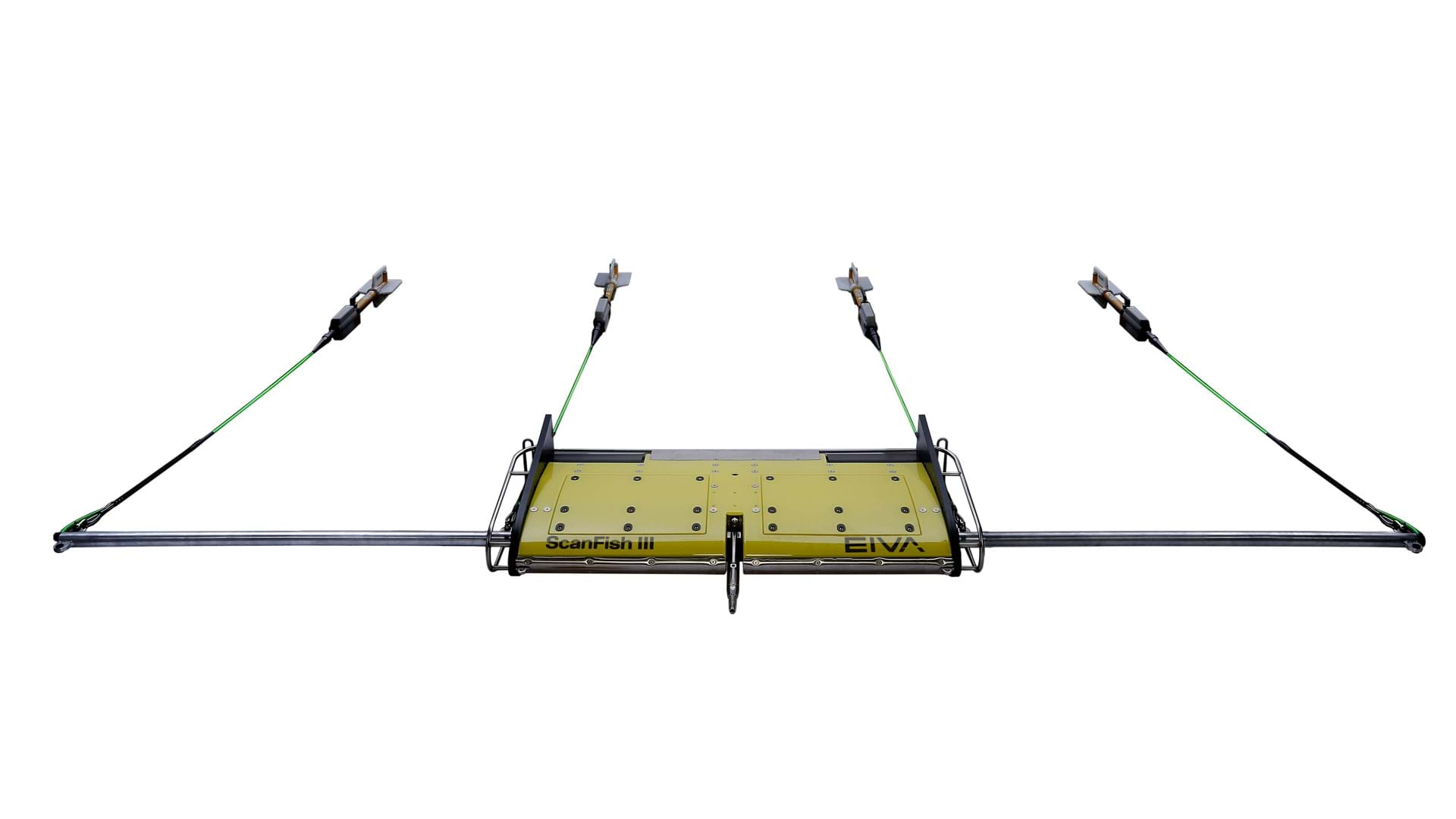
Wide and dense coverage at a fixed height
The terrain-following operation mode of the intelligent ROTV ensures that it maintains a fixed height as close to the seabed as possible, depending on the topography. This equals high-quality data.
The horizontal array of underwater magnetometers enables you to cover a larger survey area in less time and ensures dense coverage, translating into better indication of signal strength and origin in one sweep.
The ScanFish Katria ROTV can be set to automatically follow the seabed in the ScanFish Flight software.
-
High-quality magnetometers
The magnetometer type included in the ScanFish Katria is the Geometrics G-882 Marine Magnetometer.
When only the best magnetometers are good enough
Magnetometer quality and performance are key to successful subsea surveys
Therefore, the magnetometer type included in the ScanFish Katria is the Geometrics G-882 Marine Magnetometer. This is a high-end yet low-cost solution and the most used in the industry, and a perfect fit for subsea UXO detection.
The horizontal array of magnetometers enables you to cover a larger survey area in less time and ensures dense coverage, translating into better indication of signal strength and origin in one sweep.
The Geometrics G-882 caesium-vapour marine magnetometer
-
Components and optional extras
The ScanFish Katria standard package combined with the optional extras constitute a turn-key solution.
Components and optional extras of the ScanFish Katria package
The ScanFish Katria standard package combined with the optional extras constitute a turn-key solution.
From topside unit and subsea cable termination to handling system and the possibility of mounting a pinger/beacon, Ultra-short Baseline (USBL) positioning system, or video and light, we offer you all the necessary components for an optimal magnetometer survey solution that matches your exact needs.
Components
EIVA ScanFish Katria
Including altimeter, motion and depth sensors, side extensions, tow cables and 4 Geometrics G-882 Marine Magnetometers with nose tow capability – 1 unit fitted with altimeter 30 m range/500 kHz1 Geometrics G-882 assembly for sensor altitude measurement
4 Geometrics G-882 modification to provide depth measurement
1 Geometrics MagLog Lite logging/display software
Subsea cable termination
Stainless steel tow termination point for mounting on coax cableDeck cable
30 mScanFish - Power & communications topside unit
2U rack unit 19” containing power supply and communications, depth: 35 cm, weight: 7 kgCase
Heat-treated, water-resistant plywood case for transport and long-term storage, 158 kg, B195xD104xH84 cmEIVA ScanFish III Flight control and monitor software
Data output: cable counter, basic ROTV status (NaviPac format), depth and altimeter (NaviScan format)
Requires minimum (with standard components): dual core Intel, 4 GB RAM, 100 GB 7200rpm HDD, Windows 7 ProOptional extras
3D steering
Hardware solution which introduces horizontal movement control capabilitiesEIVA NaviPac/NaviEdit software
Navigation information and positioning calculations for advanced survey planningGeometrics MagLogTM recording software
Data acquisition and real-time monitoringEIVA NaviSuite processing
Real-time interfacing of G-882 magnetometers into NaviPac for data monitoring and recording, and NaviEdit for processingROTV cradle
For deck mounting, incl tarpaulinEIVA OceanEnviroTM winch system
PC
Monitor
Mounting of exterior sensors/equipment
For example pinger/beacon, Ultra-short Baseline (USBL) positioning system, or video camera and lightTow cable
Choose from a variety of faired cable options to further reduce drag of your ROTV system -
User-friendly control and monitoring software solution
All ScanFish models come with the ScanFish Flight software, which is an easy-to-use software system allowing for control and monitoring of the ROTV.
User-friendly control and monitoring software solution
All ScanFish models come with the ScanFish Flight software, which is an easy-to-use software system allowing for control and monitoring of the ROTV.
Controlling the ROTV's movements in ScanFish III Flight software
Only a minimum of training is required to prepare the crew to operate the ROTV, which means you will be ready to set sail within a short period of time. Moreover, there is no risk of wasting time on difficulties resulting from a complicated software user interface.
Via the intuitive interface of ScanFish Flight, you are in complete control of the position of the ROTV by defining its height compared to the seabed. At the same time, you can monitor its position in the water, and an alert panel will warn you of any irregularities.
ScanFish III Flight in action
On-site calibration
A pre-flight feature allows for testing and calibration of the ScanFish ROTV on-site prior to deployment, promising you the highest possible performance and data quality.
Recording of flight data
Acquired ROTV data can be analysed by means of a flight recording feature. It enables you to play back all flights and, for example, quickly locate the cause of any irregularities, thus enhancing the quality of your results and saving survey time.
Automatic control of winch
ScanFish Flight can be set up to control the winch towing the ScanFish ROTV, thereby ensuring an optimal cable length adjusted to the movements of the ROTV. This is especially relevant for the ScanFish Rocio models.
-
Robust product with a long service life
The practical design of the ScanFish models makes them so robust that they can be deployed in rough weather.
Robust product with a long service life
Quality materials and easily replaced wear parts characterise the ScanFish range and contribute to a high ROI through a long service life
The practical design of the ScanFish models makes them so robust that they can be deployed in rough weather. This saves time as the risk of downtime is vastly reduced. Two side plates with bars, which also function as handles, protect the body and facilitate handling, thus reducing the risks posed to the ROTV in the water and ensuring the safety of the crew during deployment and recovery.
-
Operator courses: repair, maintenance and practical training
EIVA hosts hardware operator courses delivering you the skills and knowledge you need to ensure you get the most out of you ScanFish ROTV.
Combining hands-on practice with expert guidance and advice.
EIVA hosts ScanFish operator courses designed to deliver participants the skills and knowledge to ensure they get the most out of their EIVA equipment.
Under guidance from our expert engineers, these operator training courses deepen your knowledge and understanding of the ScanFish ROTV, improve your practical operator skills and enhance your technical abilities to service and maintain your ScanFish. Featuring classroom work, technical workshops covering hardware repair and maintenance, as well as practical training at sea, EIVA ScanFish operator courses provide a comprehensive platform for expanding your competences.
If you’re interested in a ScanFish operator training course, reach out to let the EIVA team know. We will update you on upcoming hardware operator courses sailing your way.
What do customers say?
'May I say the course and content were spot on, this coupled with an excellent facility and more importantly very knowledgeable, professional, and friendly people that were experienced does indeed make for a winning combination and I will be recommending this course to my seniors for future staff participation.'
Mark Gordon, Survey Engineer, ScanFish Operator course participant -
Avoid obstacles more smoothly than ever
This autopilot flight mode uses your vessel’s echo sounder data as an early warning system to avoid obstacles while keeping sensors stable.
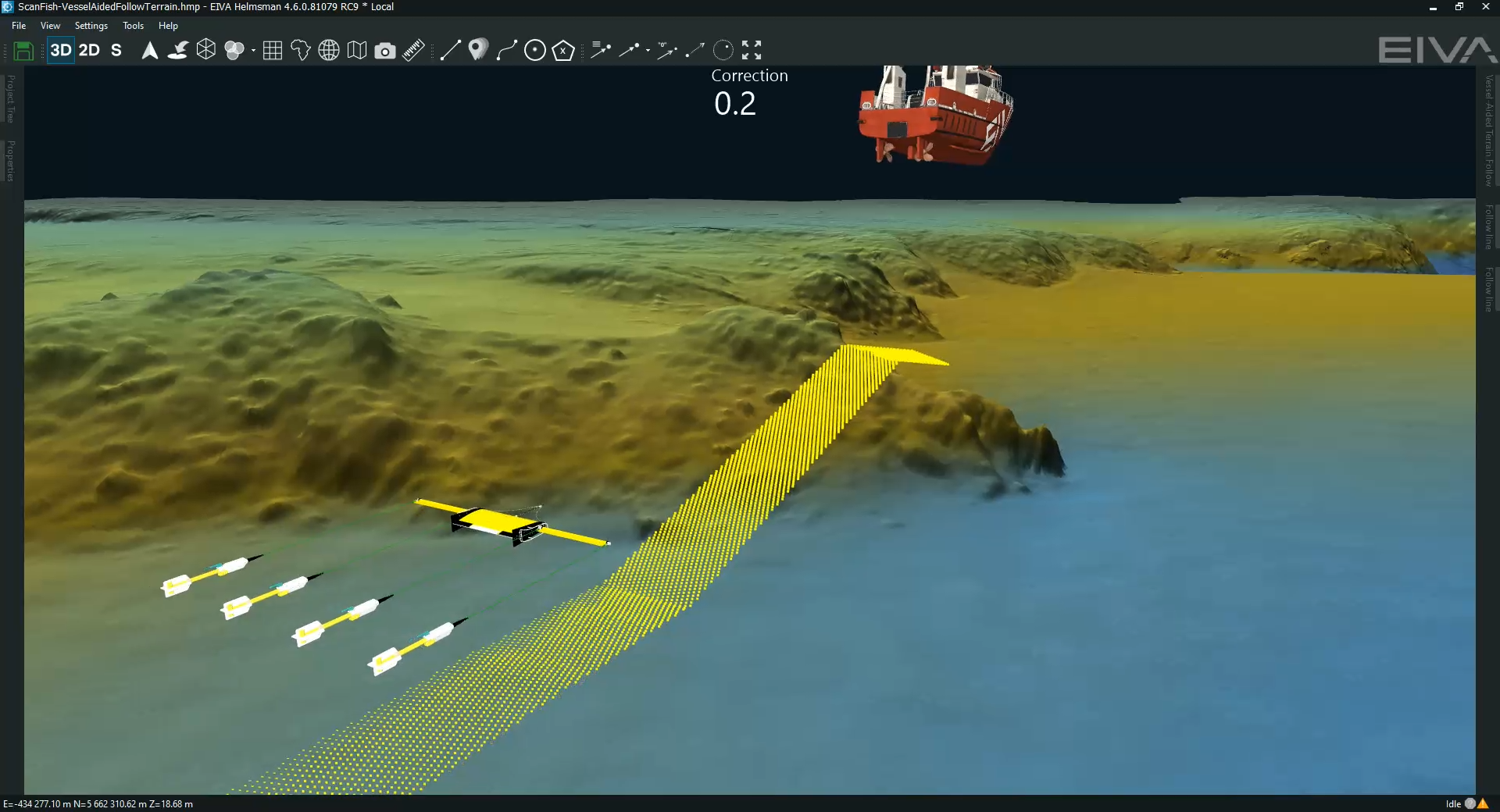
Vessel-Aided Terrain Follow mode
Avoid obstacles more smoothly than ever through automated real-time calculations – this flight mode uses your vessel’s echo sounder data as an early warning system to avoid obstacles while keeping sensors stable.
Video showing the ScanFish Vessel-Aided Terrain Follow mode in action, making the ScanFish avoid steep obstacles on the seabed more smoothly than it would have if it were using only the ScanFish altimeter sensor for obstacle avoidance – thereby achieving stability for optimal sensor performance
The ScanFish Vessel-Aided Terrain Follow mode optimises your vertical runlines based on a DTM (online and/or pre-surveyed). The main advantages are…
It ensures smooth obstacle avoidance, so your data collection isn’t disturbed by any sudden movements of the ROTV, which could otherwise occur if there is a large, steep obstacle, such as a boulder. This is because the altimeter sensor onboard the ScanFish would register the obstacle when closer to it, causing the ScanFish to move quickly out of the way to avoid it. On the other hand, with the Vessel-Aided Terrain Follow mode, the ScanFish can react ahead of time thanks to an early warning from the DTM, and therefore you have the option to make it do avoid obstacles more smoothly over time.
You minimise risks to your ROTV by not only reliably predicting obstacles and avoiding them (as the ScanFish ROTV already does) but also customising how you avoid them, so your ScanFish ROTV’s vertical steering is tailored to your specific ROTV configuration (with this new mode, you can customise the area in which obstacles are avoided and the slope with which the ROTV avoids them.
The area highlighted in yellow is the corridor in which objects are considered relevant obstacles to be avoided using the Vessel-Aided Terrain Follow mode – and the two yellow spheres below the ScanFish model show the correction to the vertical route
Stay safe with a failsafe
This new steering mode is doubly designed to avoid any harm to your ScanFish. The EIVA team has equipped it with a failsafe function for the unlikely case of a malfunction in the setup causing your ScanFish to receive erroneous data from the synthetic altimeter calculated by NaviPac. An error in the synthetic altimeter can occur for example if you are using a pre-surveyed DTM which is outdated, as a new obstacle has appeared since then. In such a case, the priority will always be given to the minimum height registered by the ROTV altimeter mounted on your ScanFish.
Easy integration with your ScanFish ROTV
This automated steering mode is available for all ScanFish systems. In addition to your vessel and any model of ScanFish ROTV, this steering mode uses the following components…
- Multi-beam echo sounder on the vessel which is towing the ScanFish (optional as you can alternatively use pre-surveyed DTMs):
- Acquires seabed data to create a real-time DTM
- NaviSuite Kuda Pro, EIVA’s hydrographic survey software solution (alternatively, if using a pre-surveyed DTM, you can use NaviPac Pro or NaviPac Single User):
- Collects multi-beam echo sounder data and creates a DTM in real time – or displays a historical DTM
- Calculates your ROTV’s optimal vertical route based on the DTM and your settings for obstacle avoidance
- Inputs synthetic altimeter values to your ScanFish Flight software so you follow this route
- Multi-beam echo sounder on the vessel which is towing the ScanFish (optional as you can alternatively use pre-surveyed DTMs):







Specifications
- SCANFISH KATRIA INCL MAGNETOMETERS
- Length
- 5.19 m
- Width
- 5.08 m
- Weight
- 206 kg
- Distance from ROTV to magnetometer sensor heads
- Approx 4.3 m
- ROTV DIMENSIONS
- Length
- 0.90 m
- Height
- 0.26 m
- Width
- 1.80 m
- Weight air/water
- 75/0 kg
- WITH 3D STEERING OPTION
- Length
- 1.21 m
- Height
- 0.85 m
- Width
- 1.86 m
- Weight air/water
- 123,5/56,3 kg
- ROTV PERFORMANCE
- Depth rating
- Max 400 m
- Operational depth
- Up to 400 m – Depends on ScanFish configuration, operation speed and winch configuration – Use of automatic operation modes requires automatic winch control. Typically 40-60 m, max depth experienced with 3D system and line keeping is 120 m.
- Towing speed
- 4-6 kt
- Dive/climb speed
- 0-2 m/sec
- Anti-collision climb
- 3 m/s = 45° at 6 kt
- Vertical position precision
- 0.2 m
- Roll precision
- 0.5°
- Max slope, terrain-following mode
- 20°
- MAGNETOMETERS
- Operating principle
- Self-oscillating split-beam caesium vapour (non-radioactive)
- Operating range
- 20,000–100,000 nT
- Heading error
- <1 nT over entire 360° spin and tumble
- Absolute accuracy
- <3 nT throughout range
- Output
- RS-232 at 1,200–19,200 Baud
- Sensor fish
- Body 7 cm diameter, 1.37 m length with fin assembly (27.94 cm cross width), 18 kg – Includes sensor and electronics and 1 main weight
- Operating temperature
- -30°F–+122°F (-35°C–+50°C)
Related products
-
NaviSuite Kuda Pro
Unmatched software with deep feature list for shallow water data acquisition – Supports all relevant instruments – Unlimited remote displays – Tracking of a subsea object.
€ 80.00/day€ 4,950.00/year€ 14,850.00/permanent -
Equinox
Multi-aperture sidescan sonar towed with a ScanFish remotely operated towed vehicle for UXO operations.
-
ScanFish 3D steering
Enhance the manoeuvrability and flight path capabilities of ScanFish.
€ 45,850.00/unit -
ScanFish Katria excl magnetometers
The ScanFish Katria is an intelligent wide-sweep remotely operated towed vehicle (ROTV) solution for time-efficient magnetometer surveys.
€ 117,000.00/unit -
OceanEnviro 8.6
The OceanEnviroTM 8.6 is a high-quality and cost-effective electrical winch for deployment of oceanographic and hydrographic equipment.
€ 74,800.00/unit -
ScanFish Magnetometer Frame
Fixed Frame for 2D or 3D ScanFish Katria for up to 8 magnetometers (2x4) incl cables, excl magnetometers.
€ 85,550.00/unit