To use this site, please enable javascript
To use this site, please enable javascript
Sonar and laser data can include a relatively high level of noise. A wide selection of data cleaning tools is available in the EIVA NaviSuite software products to help remove the noise. These range from various manual as well as automated cleaning/data processing techniques using algorithms such as CUBE/CHRT or S-CAN.
Many of these algorithms have been developed with the purpose of ‘finding’ the seabed, and are consequently especially useful when cleaning 2D data – but less efficient when cleaning 3D data such as laser scans of structures, water column data from sonars, and the like.
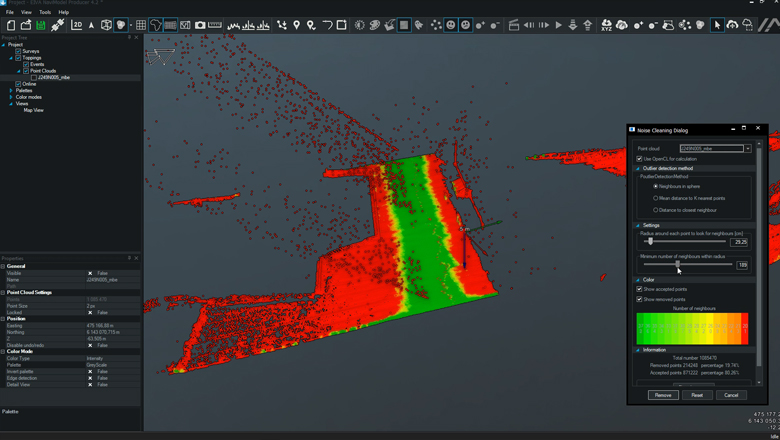
As 3D data has entered the maritime industry in recent years and is now used by the majority of our customers, we decided to create a new set of cleaning tools designed to handle not just 2D but also 3D data. That is, tools that can handle noise such as the example shown in the screenshot below: This is a LiDAR (terrestrial) scan that we made from an ATV for a harbour inspection demonstration. It illustrates the issues posed by 3D data quite well as it includes a number of features that should be preserved such as people, a fence and a flag pole together with lot of data noise.

Data set with noise (for example the points in the red circle)
The mission is now accomplished, and we are happy to introduce our new data cleaning option EC-3D (EIVA Cleaning 3D), which collects the new tools, all designed for cleaning sonar as well as subsea and above-water laser data.
The various approaches are useful for different applications and can be applied on top of each other.
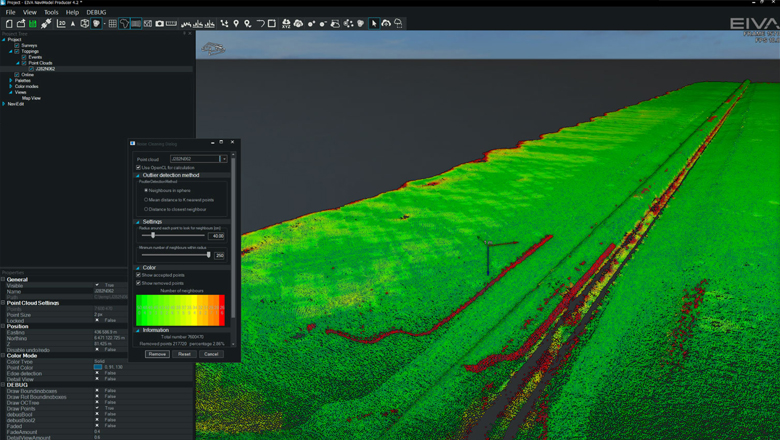
EC-3D efficiently removes all the noise in the LiDAR example while preserving elements such as people, flagpole, fence etc.
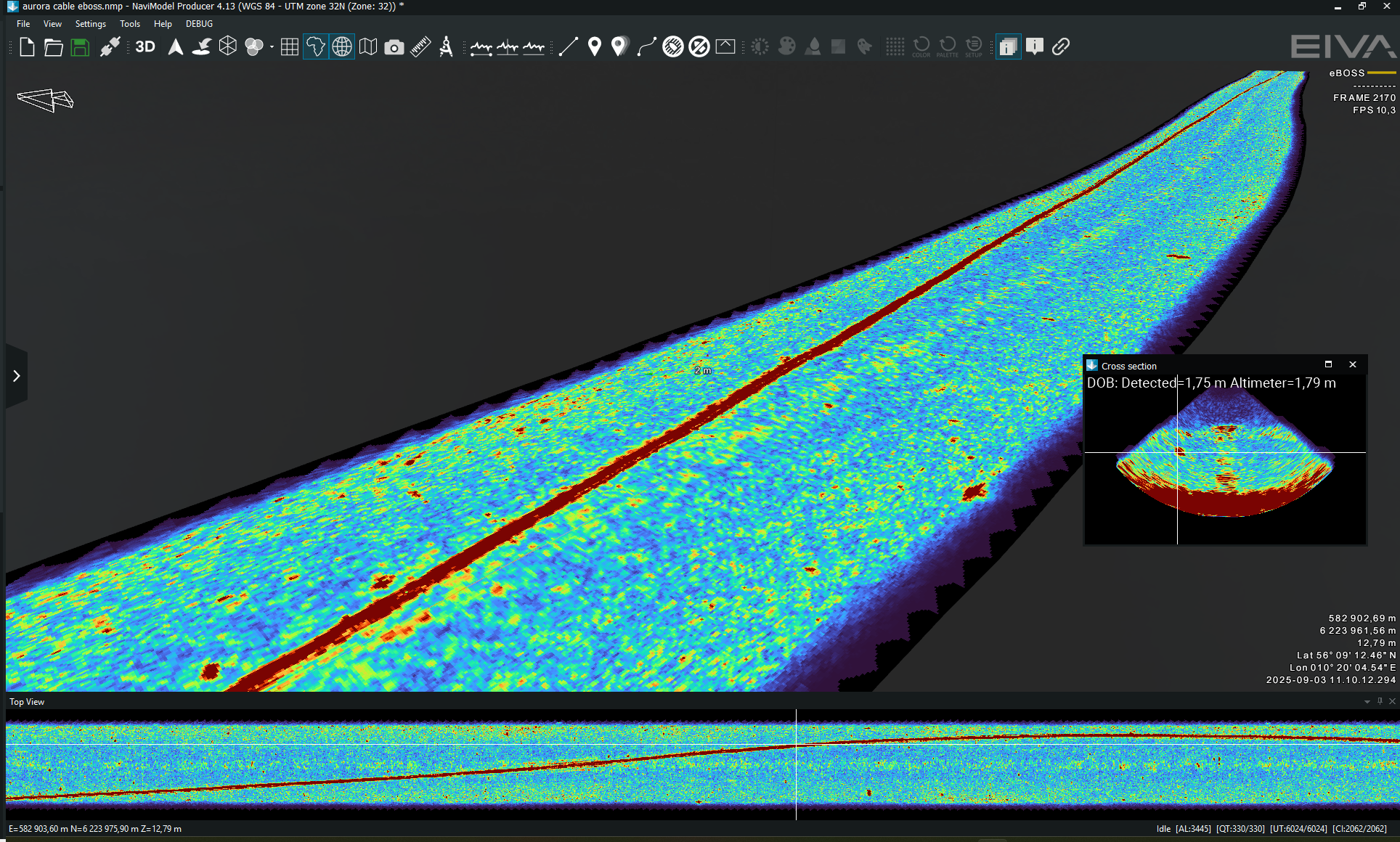
Looking at other examples, EC-3D also proves its worth when cleaning sonar data from pipe line inspections – preserving the pipe line in the process.
Artefacts resulting from the sonar ‘hitting’ the ROV are efficiently removed with EC-3D, while preserving the pipeline in the process.
We have been running EC-3D on a number of data sets that we have received from our customers and these have proved difficult to clean with other methods. We are happy with the results, which all add to the conclusion that EC-3D handles challenging cleaning tasks very well.
Until now, S-CAN was the fastest cleaning implementation available in the market, but EC-3D is many times faster – in fact, typically 10 times faster, and in most cases handles the cleaning ‘near-instantly’, as we call it.
Cleaning a point cloud of 10 million points takes 2.5 seconds, and 3.6 million points (typical sonar block size) only takes 1 second, so there is no risk of EC-3D becoming a bottleneck in point cloud processing.
Moreover, EC-3D will benefit from good graphics cards, as it uses GPU acceleration to achieve its high performance. We use OpenCL, so if you do not have an OpenCL-enabled graphics card, it will just use the CPU.
S-CAN has been the primary means of automated cleaning in NaviSuite since the cleaning tool was introduced in 2010. There will be no future development on S-CAN, and, consequently, NaviSuite SMS (software maintenance and support) customers will not be charged for S-CAN in 2018 onwards.
Existing S-CAN licences will continue to work, and future versions of NaviModel will continue to support existing versions of S-CAN.
All SMS customers with S-CAN licences will receive EC-3D for free, and can sign up to EC-3D SMS as of 2018.
The price of EC-3D is approximately 50% lower than S-CAN licences, and volume discounts and subscriptions are available, matching the NaviModel licence to which EC-3D is connected.
EC-3D will be shipped with NaviModel 4.2, which is to be released in the coming months.