To use this site, please enable javascript
To use this site, please enable javascript
Our software team has been busy working on upgrading our sidescan sonar functionalities throughout our NaviSuite product line. A lot of cool features have come out of that, which we are happy to share.
Starting at the equipment end, we have updated our drivers to support the latest Klein 3500 and 5900 sonars for both sidescan and bathymetry data.
At the same time, we have implemented full streaming of the real-time sidescan data to any NaviPac 4 Helmsman’s Display or NaviModel 4 position. This reduces the need for NaviScan displays, since the sonar control settings can also be changed within NaviPac/NaviModel.
Special effort has been put into how the sidescan data is rendered on the display. It may sound simple, but it is more complex than it might seem.
Some sidescan sonars will produce as many as 6,000 sonar soundings (ie points) for each scan. Since a display is typically not more than 1920x1080, even with 3840x2160 (4K) there are not enough pixels on the screen to display the full resolution image – therefore downsampling needs to take place.
There are many ways to implement this downsampling, and there is a big difference in how well the result. A simple, ‘use every second sounding’ will reduce image quality and miss details, where 'use average values’ will blur the image – neither of which is ideal. We have therefore implemented some intelligent filters that will ensure a crisp display of the differences in the sidescan data, so that features stand out.
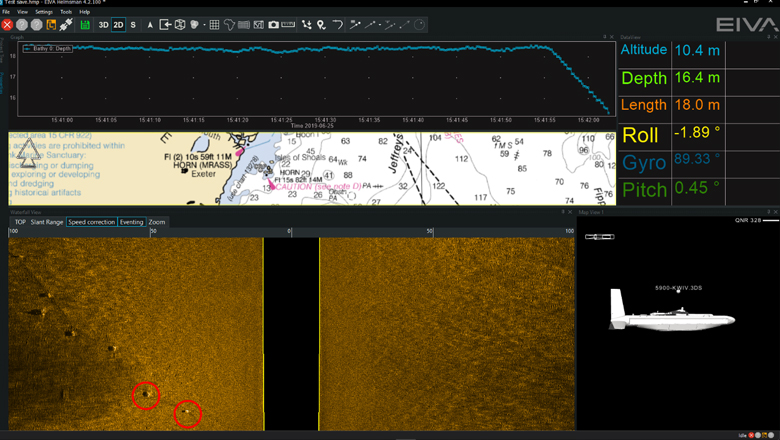
Live sonar acquisition in NaviPac
We have made it possible to select different display techniques, and of course also various colour palettes – so that you can run multiple displays of the same data to distinguish features more easily.
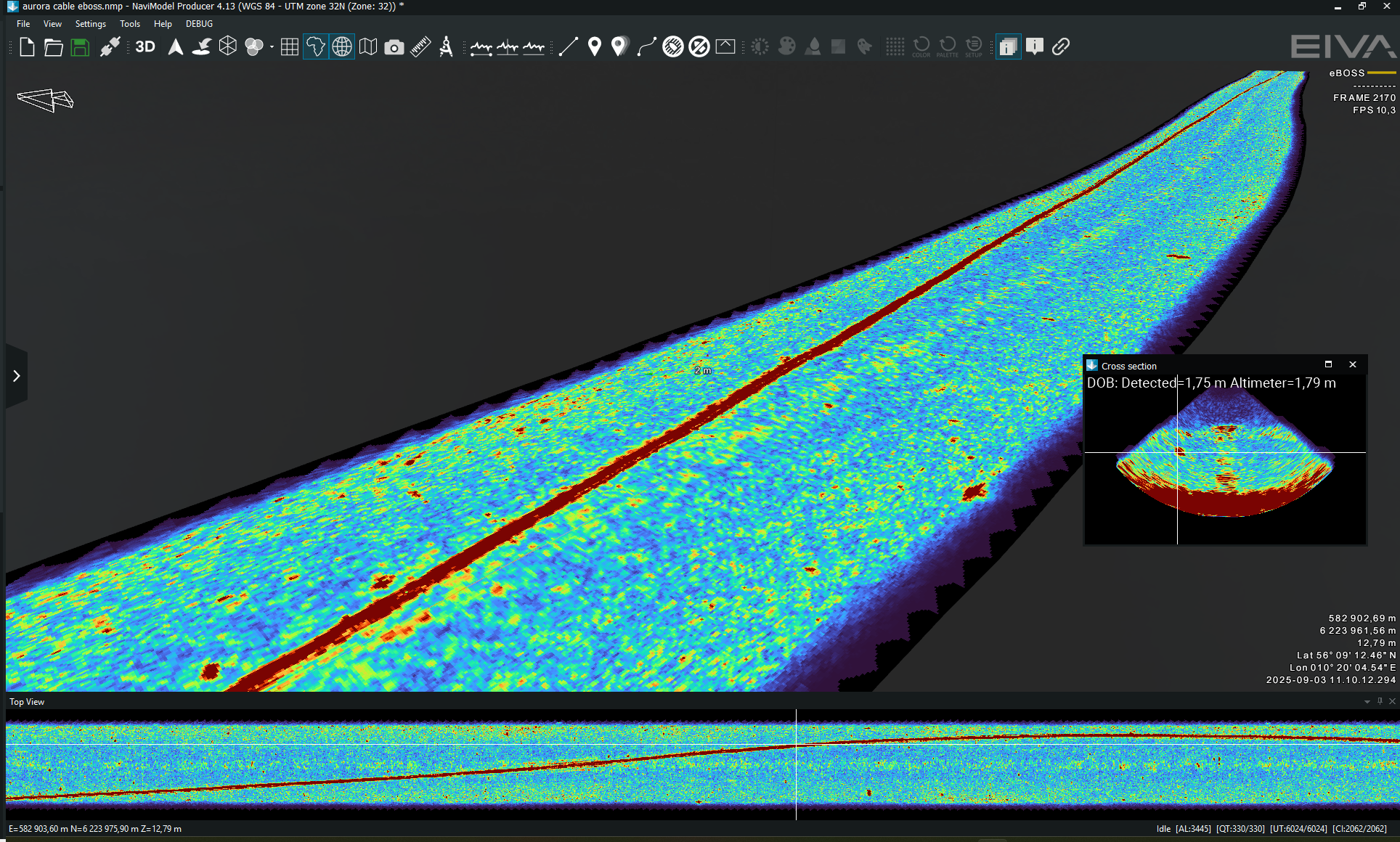
Multiple sidescan sonar representations in NaviModel
The dockable sidescan view will scale to the window size you have chosen, and for small windows sizes, the resolution is obviously reduced. We have therefore made an intuitive magnification function which displays the full resolution data wherever the cursor is.

Real-time magnifying glass zoom, showing full resolution data where the cursor is
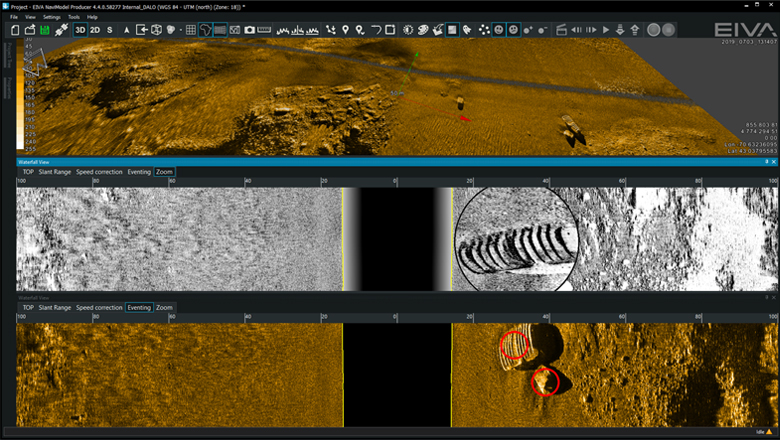
The NaviSuite eventing functionality of course works on sidescan data as well, so that it is possible to click in the sidescan waterfall and generate events, ie targets of interest. Events are marked in the waterfall as well as in the 3D views, if position information is available.
Using the new ‘compare event collection’, it is easy to correlate targets found in sidescan and, for example, bathymetry data.
A scaled snapshot of the target and the surrounding area is stored with each event and allows the user to measure and annotate the target.
Our NaviSuite Deep Learning automatic object detection has been trained on sidescan data, hence targets can be automatically picked up in sidescan data as well.
This is briefly how it works: the Deep Learning option will investigate all sonar data (top left image) and for each ‘pixel’ assign a probability of the pixel belonging to a target of interest (top right image). This is being filtered based on user selectable thresholds (bottom left image), so the targets are easily found by the algorithm, and the target is identified (bottom right image). All the user sees in this process are a number of targets being marked automatically and appearing in the events list as any other event.
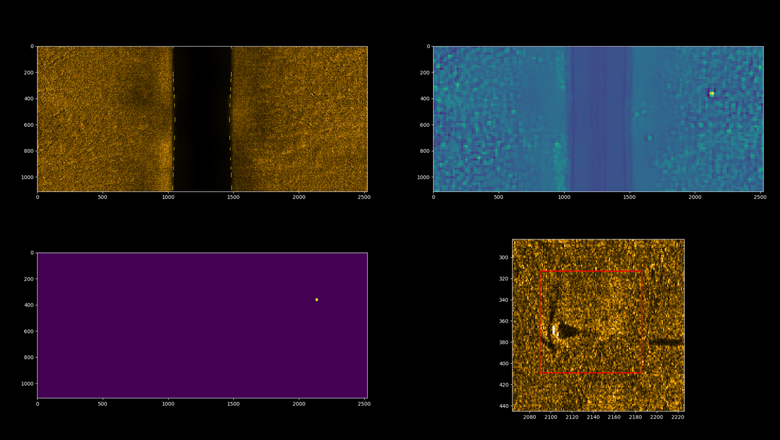
NaviSuite Deep Learning automatic object detection in sidescan data
The new sidescan functionality is still under testing with selected customers – to be released later in 2019. The features will be included for free in the relevant packages (ie NaviScan, NaviSuite Kuda, NaviSuite Nardoa, and NaviSuite Deep Learning).